Эта тема зрела давно, и разбивать её на три части было бы не совсем правильно. Поэтому приготовьтесь, будет несколько видео, несколько примеров и вообще, смело добавляйте её в закладки. В конце статьи буду добавлять ещё ссылки на материалы позднее, а теперь поехали.
Про тему регулирования и управления знают все, кто планировал что-либо автоматизировать. Если взяться за любой процесс и его пытаться автоматизировать, то в первую очередь необходимо начинать с технологии процесса.
То есть необходимо, как минимум, понимать, что с чем связано, и как всё происходит. Только затем составлять технологическую схему, и далее уже вводить регуляторы.
Способов регулирования достаточно большое количество, но достаточно простой и надежный, а самое главное, проверенный временем - это ПИД регулятор.
Почему именно ПИД, а не П или ПИ, или ПД, они же проще, скажете вы. Отвечу просто: из ПИД всегда можно получить любые три из них. Тем более, большинство современных регуляторов созданы на программном уровне, и обрабатываются микропроцессором, а не на ОУ (операционных усилителях), как раньше. Хотя на ОУ тоже достаточно интересно.
Итак, для начала, поделюсь видеороликом, снятым зарубежным коллегой и переведенным на русский язык, но с моими добавлениями.
Поверхностное описание принципа работы ПИД-регулирования
Теперь вы немного знакомы с общей идеей, и мы движемся дальше. Для того, чтобы описать процесс в формулах, необходимо вспомнить или узнать что такое:
- сложение - просто складываем два сигнала (например 5 В и 3 В), или
- вычитание - аналогично первому, только со знаком минус
- умножение - умножение одного числа на коэффициент (пропорциональное регулирование)
- интегрирование у меня есть целая статья об этом (накопление статистики и расчет того, насколько недостаточно, или, наоборот, избыточно воздействие)
- дифференцирование (это показатель динамики системы - ускоряемся мы или тормозим).
Если с первыми тремя пунктами всё предельно просто, то со следующими уже необходимо разбираться и понимать, как они воздействуют на объект. Но лучше обо всем по порядку. Я предлагаю рассмотреть пример отопления дома.
1. У нас нет регулирования.
Пример простой, но в то же время достаточно наглядный. В тех домах, где есть центральное отопление, мы принимаем радиаторы как они есть. Для нас эта система не регулируема. Мы можем только открывать форточки или дополнять установкой конвектора, но в целом, как нам подали тепло из центрального отопления, так мы его и принимаем. Подробнее можно посмотреть в видеоматериале.
Тогда просто термостат будет управлять в режиме "греть - не греть" (так называемое двухпозиционное регулирование). Но и его, при желании, можно настроить очень точно.
3. Пропор2. Система простого регулирования (двухпозиционное регулирование).
В данном случае о процессе регулирования говорить можно, но совсем приближенно. Хотя в целом, система будет устойчивой.
Что мы имеем:
- теплогенератор - он же газовый котел
- датчик температуры, лучше сказать чувствительный элемент - биметаллическая пластина, которая даёт команду котлу греть или не греть
- система радиаторов, через которые идет воздействие на температуру в доме.
В данном случае котел будет подобран таким образом, чтобы в пике нагрузки работать на 80% мощности. То есть если требуется 20 кВт, то его максимальная мощность будет 24 кВт.
Нам для теоретических предположений можно сделать несколько поправок. Всё тепло, выданное котлом в систему, в итоге останется в доме (с учётом КПД самого котла).
Пропорциональное регулирование.
Идея достаточно проста. Мы можем выдавать управляющее воздействие на объект с мощностью от 0 до 100%. Если объект мы также можем и охлаждать, то можно сделать от -50 до +50%. Самое главное - выбрать вспомогательный коэффициент. Но лучше по порядку.
Пропорциональное регулирование хорошо можно понять по картинке:
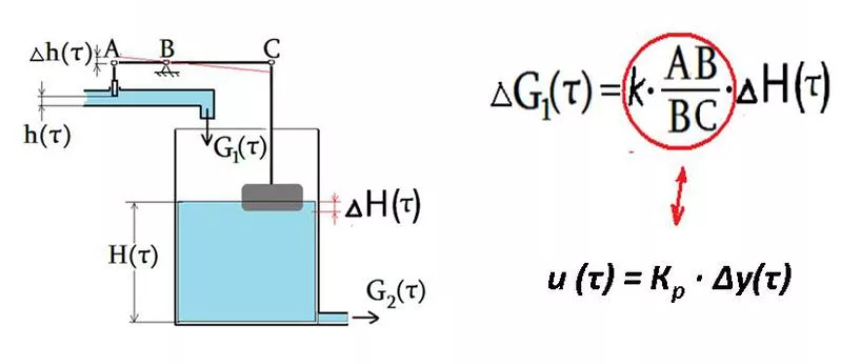
У нас есть клапан А, рычаг В и шток С, прикрепленный к поплавку. Как только поплавок начинает подниматься , он тут же через крепление В начинает прикрывать клапан А. Если вода уходит из емкости, поплавок опускается, и через рычаг В поднимает клапан А. Менять коэффициент регулирования можно с помощью приближения или удаления В от А. Менять уставку можно, удлиняя или укорачивая шток С. Это пример для наглядности. Для математического описания используем немного другую схему.
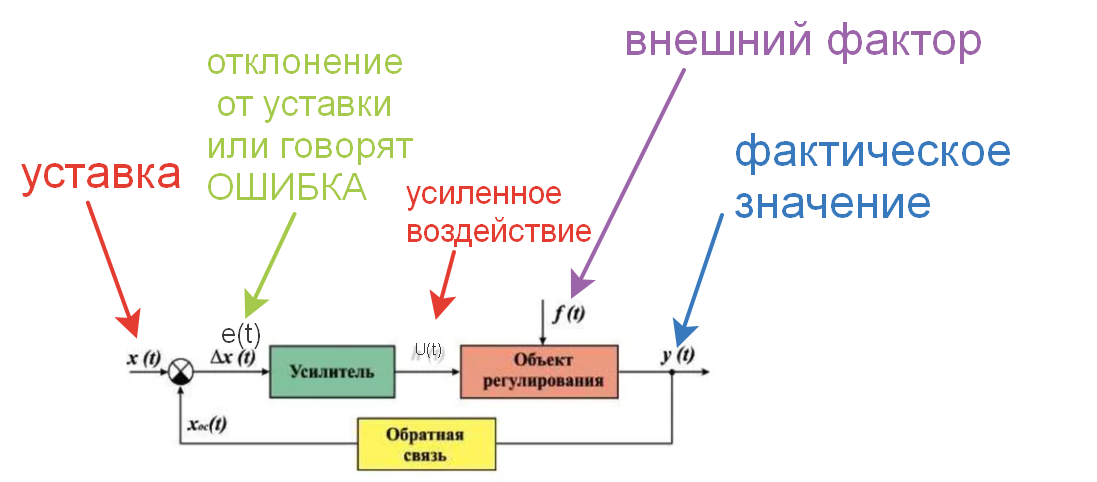
Итак, схема у нас есть и на рисунке всё подписано, теперь перейдем к формулам. U(t) - это воздействие на объект (на схеме тоже есть), оно получается из умножения ошибки е(t) (на схеме еще как дельта Х) на коэффициент пропорциональности.
Особенность пропорционального регулирования в том, что при нем есть статическая ошибка. Она взялась оттуда, что мы никогда не компенсируем её через обратную связь. Каждый раз уменьшая разницу между входом и выходом, мы уменьшаем и воздействие на регулятор. Как итог, ноля мы никогда не достигнем.
Подробнее, а заодно и другие виды регулирования, можете посмотреть на видео:
4. Интегральное регулирование.
В основе любого интегрирования лежит процесс суммирования. То есть, в данном случае мы будем производить накопление ошибки.
Сделаю небольшую оговорку, сейчас мы разбираемся с медленно изменяющимся процессом, для того, чтобы понять смысл работы каждого звена. В реальных процессах изучение идет через частотные составляющие, и подход к обработке сигнала отличается от текущего.
В нашем случае интегрирующее звено имеет смысл рассматривать совместно с пропорциональным, где они дополняют друг друга в работе.
В данном случае мы накапливаем эту ошибку на протяжении всего участка и, в итоге, устремляем систему к балансу, то есть минимизируем ошибку. Если в пропорциональном звене у нас есть статическая ошибка (постоянное недорегулирование), то с таким звеном мы будем устремлять эту ошибку к нулю.
Как это работает: пока есть ошибка, воздействие будет расти. Если произошло перерегулирование (ошибка стала отрицательной), то мы будем снижать воздействие. В этом вся суть интегрирующего звена в данной троице.
5. Дифференциальное регулирование.
В данном регуляторе, если вы посмотрели видеоролик, вся идея дифференцирования - это прогнозирование, предвидение ситуации. Заключается она в том, что мы ловим динамику.
Суть производной - это угол наклона характеристики.
Логично предположить, , что, зная наклон в данной точке, мы можем понимать, куда стремится функция. Соответственно, принимаем решение о "торможении" или наоборот, поддержке, тем самым сглаживая переходные моменты.
Как итог, хочу продемонстрировать интересную гифку из википедии. Её разбор есть в видеоролике.
Итак, это было знакомство с ПИД регулятором для начинающих.
А правильнее сказать - для вялотекущих процессов.
В реальности, в системах регулирования расчет и построение передаточных звеньев строится немного другим образом.
Если всё было бы так просто, то чему так долго учиться в ВУЗе? Если предыдущие 5 пунктов вам понятны, или вообще показались легкотней, то добро пожаловать в пункт 6, где тезисно знакомимся с ключевыми моментами настоящей ТАУ.
для особо продвинутых и тех, кто считает себя гуру, после прочтения 6 раздела добро пожаловать в комментарии.
6. ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ - знакомство.
Итак, есть такая замечательная книга
Бесекерский В.А., Попов Е.П. Теория систем автоматического управления
её объем чуть более 700 страниц, чтобы её просто начать читать, я не говорю про понять, необходимо обладать следующими знаниями:
1.Пределы, производные и интегралы.
2. Линейные уравнения и матрицы.
3. Комплексные числа и работа с ними.
4. Различные частотные характеристики и передаточная функция.
То есть, если вы серьезно взялись за квадрокоптер, то банальным ПИД-ом тут не отделаться.
Вот пример из книги разбора интегрального звена(да да, там уже идут звенья)
При таком подходе изучение идет с точки зрения частотных характеристик сигнала. Так, например, любой усилитель - это набор звеньев, который должен пропускать и усиливать только необходимые частоты.
А такие формулы и преобразования:
для вас должны быть обыденными и типовыми.
Не сложно догадаться, что процесс моделирования - это, в первую очередь, понимание технологического процесса и знание азов высшей математики.
Я ни в коем случае не отговариваю Вас от того, чтобы идти дальше, наоборот, я показываю, где начинается настоящая динамика и робототехника.
Фактически мы с вами рассмотрели простое управление и реакцию с заглядыванием вперед. Возможно, чуть позднее еще добавлю ролик о другом ПИД регулировании.
Благодарю за то, что дочитали.