Наверное, читателям этого канала не надо лишний раз напоминать, кто такой Виталий Андреевич Грачев: знаменитый советский конструктор вездеходной техники, создавший все первые автомобили повышенной проходимости на ГАЗе, спроектировавший первую большую советскую амфибию БАВ во времена своей работы на Днепропетровском автозаводе, а затем возглавивший Специальное конструкторское бюро при Московском автозаводе.
За четверть века, что Грачев стоял у руля СКБ ЗИС / ЗИЛ, этот «завод в заводе» выдал на гора десятки образцов вездеходов, аналогов которым порой не было не то что в Союзе, но и в мире. Самыми известными работами СКБ стали те машины, что выпускались потом серийно на Брянском автозаводе: это специальные двухмоторные шасси серий 135К и 135ЛМ и их модификации.

Вот и сегодня мы предлагаем вспомнить об одной экспериментальной машине, имеющей самое прямое отношение к обоим названным выше семействам одновременно: и 135К, и 135ЛМ. Точнее, это даже не машина, а экспериментальный активный трехзвенный автопоезд, который назывался ЗИЛ-135КП.
Тут требуется небольшой ликбез по маркировке. Вся техника, которая разрабатывалась в СКБ и изготавливалась там же в опытном порядке, несла (в зависимости от года постройки) марку ЗИС или ЗИЛ. Однако после передачи серийного производства в Брянск на БАЗ машины полностью обезличивались и из соображений секретности никакой марки более не несли. Во всех документах они впоследствии именовались «изделием», «объектом» или «шасси»: изделие 135К, изделие 135ЛМП, изделие 135ЛМТ и т.д. Таким образом, для опытной московской машины справедливо наименование ЗИЛ-135К, но для серийной брянской – уже просто 135К.
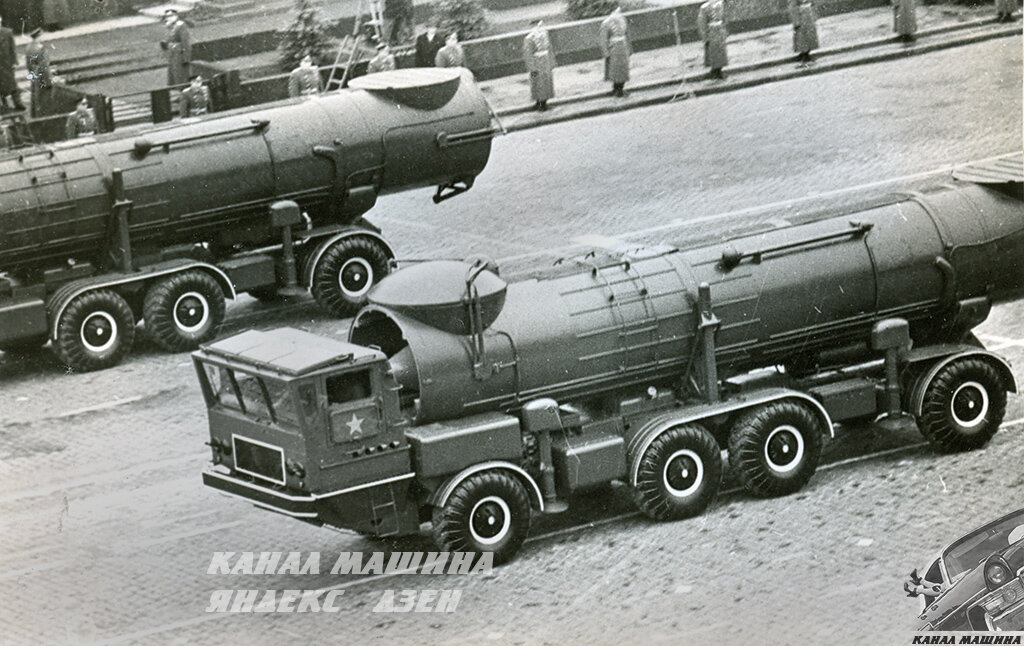
Но вернемся к ЗИЛ-135КП. Этого монстра с колесной формулой 24х24 построили в 1969 году для экспериментальных исследований устойчивости и управляемости трехзвенного активного автопоезда. Он состоял из так называемого «лидера» (шасси ЗИЛ-135ЛН) и двух прицепных звеньев, построенных на основе ЗИЛ-135К. При испытаниях ставилась задача проверки принципиальной возможности использования активных прицепных звеньев с осевой формулой 1-2-1 и крайними управляемыми осями в составе трехзвенного автопоезда. Построить-то такую «гусеницу» было можно, но останется она столь же маневренной, сколь и обычное шасси 135К, и сможет ли поддерживать движение на скоростях порядка 60 км/ч – теория ответов на эти вопросы не давала.
Итак, каждое звено имело по два 180-сильных бензиновых двигателя ЗИЛ-375, оснащенных системами дистанционного управления и работающих в паре с гидромеханическими коробками передач. Итого, получается, у автопоезда было 6 карбюраторных моторов суммарной мощностью 1080 л.с. Собственный вес сцепки составил 36 тонн (из них 2 тонны «съели» одни только баки с топливом), грузоподъемность – 23 тонны, а габаритная длина – больше 45 метров! Вы представляете, какой расход бензина был у этого монстра?! Впрочем, не гадайте, я и так напишу: от 400 до 450 л/100 км в транспортном режиме!!!
Доработка лидера свелась к установке беззазорной сцепки, автоматической системы управления двигателями (на базе узлов авиационного автопилота АП-5-2М), систем дистанционного управления ГМП, тормозами и централизованной подкачкой шин прицепных звеньев, самолетного переговорного устройства, систем аварийных блокировок. На прицепных звеньях потребовалось внедрить рулевое управление с переменным передаточным числом и поменять тормозные краны на электропневматические клапаны. Задающим звеном во всей системе оставался водитель, нажимающий на педаль акселератора в кабине лидера. Педаль, в свою очередь, через датчик обратной связи давала команду на включение рулевым машинкам на дроссельных заслонках двигателей прицепных звеньев. Контроль за синхронной работой всех шести ДВС осуществляется при помощи тахометров в кабине лидера.
Испытания сцепки ЗИЛ-135КП проводились в период 1969-1970 годов в Москве и на бронницком военном полигоне. С поворотливостью автопоезда все оказалось в полном порядке: его радиус поворота составил всего 13,5 метров, требуя для прохождения всех звеньев коридора шириной 6 метров. При этом на местности он спокойно преодолевал глубокие канавы шириной по 3 метра. Возможность прямолинейного движения автопоезда с максимальной скоростью одиночного шасси также признали достижимой, но только не с существующей системой гидромеханического привода рулевым управлением прицепных звеньев – та страдала большими люфтами и большой зоной нечувствительности. По этой причине при испытаниях автопоезда со скоростями около 60 км/ч в прицепные звенья приходилось сажать водителей, которые брали управление поворотом колес на себя. В полностью же автоматическом режиме сцепка смогла безопасно двигаться со скоростями до 25-27 км/ч при воздействии рулевого привода на передние и задние колеса каждого звена и до 40-45 км/ч при блокировке рулевого управления всех задних колес.
Дальнейшие работы, проводившиеся в отношении ЗИЛ-135КП, касались разработки принципиально нового следящего электропривода рулевого управления, позволяющего отказаться от жесткой связи между рулевым колесом и управляемыми осями. Руководителем данной темы был В.Б. Лаврентьев, заместитель Грачева. Все практические и экспериментальные работы в этом направлении велись в октябре-ноябре 1970 года на основе одного переоборудованного шасси ЗИЛ-135К, использовавшегося прежде в качестве прицепного звена в составе автопоезда ЗИЛ-135КП.
Вопросы электрических систем рулевого управления прежде в СССР вообще не решались, но наши инженеры были в курсе из публикаций в зарубежных открытых источниках, что подобные работы уже были начаты в США. К слову, параллельно по теме пятизвенного активного автопоезда с аналогичным рулевым управлением работали и специалисты хорошо известного военного учреждения из города Бронницы. Электропривод рулевого управления в итоге сделали на базе серийно выпускаемых блоков и двигателей общепромышленного назначения. А быстродействующую следящую систему для него разработали и изготовили в Новосибирском НИИ комплексного электропривода при участии Новосибирского электротехнического института.
Рулевое колесо в кабине лишь давало команду, на какой угол водитель желает повернуть колеса. Далее в работу вступал аналоговый блок, который выполнял проработку электрических сигналов, описывающих поворот руля. Выходящий из блока сигнал после усиления в тиристорном преобразователе активировал силовой привод поворота управляемых колес. Для питания энергией всего этого хозяйства (весьма массивного!) в одной из бортовых платформ ЗИЛа пришлось ставить электростанцию с дополнительным (третьим) двигателем ЗИЛ-375. На случай поломки автоматики в кабине предусматривались шесть аварийных кнопок, с помощью которых управлять поворотом колес можно было вручную (по две кнопки для поворота вправо-влево каждой оси в отдельности и еще две кнопки для одновременного управления обеими осями).
Испытания экспериментальной системы рулевого управления прошли в целом успешно. Ее работоспособность была опробована в самых разных режимах: поворот шасси при синхронном включении следящих систем обеих управляемых осей; поворот с блокированием задней оси при прямолинейном движении (с отклонениями до 8 градусов) и ее включением при задании угла поворота более 8 градусов; поворот при включении следящей системы одной оси с полным блокированием и без блокирования другой оси; поворот шасси от аварийной системы при включении исполнительного механизма одной или обеих осей. Всё, в целом, функционировало так, как надо. Но увы – эта грандиозная работа так и осталась, по большому счету, невостребованной отечественной промышленностью. А когда спустя много лет системы электронного управления поворотом колес таки действительно понадобились (например, для многоосных полуприцепов-тяжеловозов), нашим производителям пришлось обращаться к зарубежному опыту. Обидно…