Возник вопрос - как пилоты находят полосу, ведь видно ее далеко не всегда? А очень просто, хочется ответить на это, но, начиная отвечать, понимаешь, что не так все и просто! Поехали с самого начала, а для примера возьмем, как всегда, наш Airbus A320!

А начнем мы с того, что у нас на A320 есть такая штука как FMGS - Flight Management and Guidance System система управления полетными данными. Эта система имеет картографические данные и легко определяет местоположение самолета по данным трех (!) инерциальных систем. Они достаточно точны, чтобы за несколько часов полета обеспечить точность (у них все равно есть увод, если их не корректировать) в несколько миль. Хотя они корректируются по другим средствам. В основном по GPS, причем, обычно это происходит автоматически... Но даже без коррекции этого вполне достаточно для выхода в район аэродрома. А дальше:
Способ N1. Визуальный заход - Visual Approach.
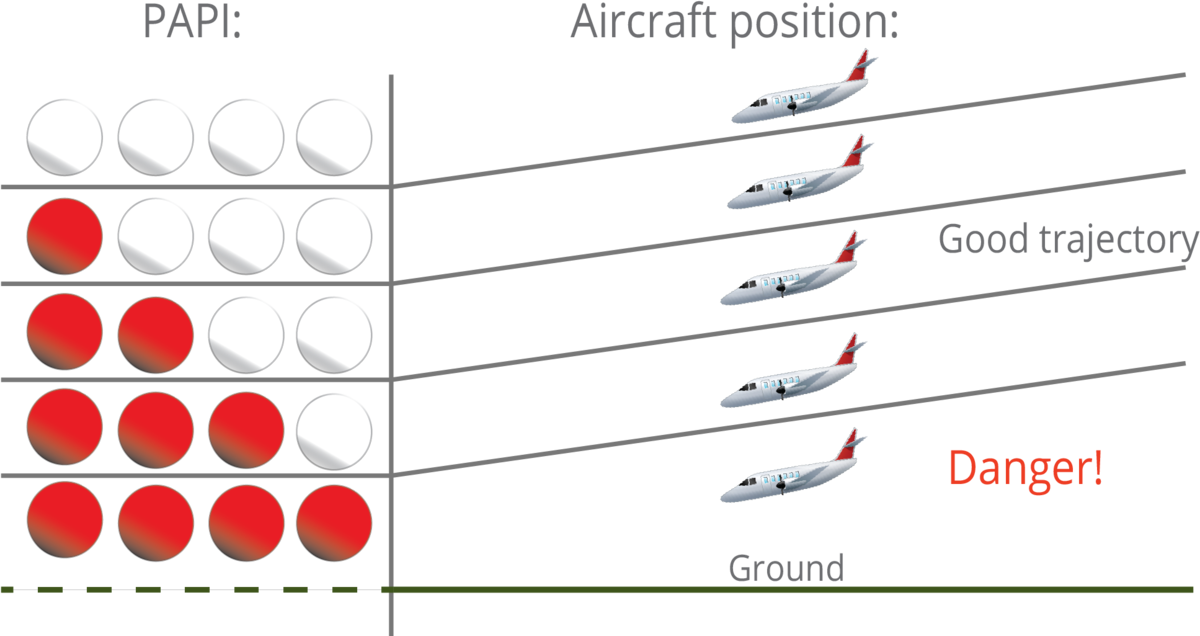
Способ этот далеко не нов и существует ровно столько же, сколько существует сама авиация. И прост как 3 копейки - находим глазами полосу, отключаем всю автоматику к чертям и летим, управляя самолетом вручную. Просто? Да. Надежно? Очень! Недостатки? Есть... Всего один. Полосу нужно видеть. В идеале - с момента начала снижения (ну, тут я обнаглел, да - за 150 км и с высоты 10 км хрен чего разглядишь!) или, как минимум, с точки входа в глиссаду. Есть условия - запрашиваем разрешение у диспетчера и, при положительном ответе, дальше летим и садимся чисто визуально. Нет условий - выполняем другой заход. С учетом необходимости обеспечения регулярности полетов и наших метеоусловий - воспользоваться им получается ой как редко! Ну и как всегда инженеры подсуетились и придумали нам подсказку - огни PAPI, глядя на которые легко оценить положение самолета относительно идеальной траектории.
Способ N2. Заход с использованием кругового маневрирования - Circle-to-land.
Это ближайший родственник первого способа и применяется когда все-таки есть какие-то условия для визуальной посадки. Но вот сказать, что полосу видно издалека - уже нельзя. В этом случае мы начинаем снижаться на радиомаяк или по ILS (подробнее будет далее), в определенный момент переходим на визуальный полет, выполняем полет "по кругу" и садимся с курсом обратным тому, с которым мы летели изначально.
Ключевой вопрос все тот же - установление визуального контакта. Но возникает вопрос - раз уж мы все равно используем некие технические средства - зачем нам переходить на визуальный полет? Все просто, представьте, что некая ВПП оборудована этими средствами только с одного курса. А по погоде (ветер!) нам нужно садиться с другим. Вот и начинаем крутиться, с соблюдением ограничений. Их два - нельзя снижаться ниже определенной высоты до установления визуального контакта с землей и, очень часто, есть ограничения по зонам визуального маневрирования - покидать пределы этих зон в процессе захода нельзя. Просто ли это? Достаточно просто. Надежно? Вполне. Недостатки? Да те же самые, что и у первого способа - нужны какие-никакие условия. Хотя годятся и чуть худшие, чем при чисто визуальном заходе.
Способ N3. Заход по приводам - NDB Approach.
Способ этот тоже достаточно стар, он существовал уже в 30-е годы 20 века. Достоинство его в том, что он позволяет снижаться не видя земли (до определенного момента). Как это работает? Представьте линию, продолжающую осевую линию ВПП в ту сторону, откуда мы заходим на посадку. На этой линии стоят два радиомаяка - мощных передатчика, работающих на определенной частоте. Стоят они обычно на удалении 1 и 4 км (0,6 и 2,2 мили) от торца полосы. Если иначе - это всегда отдельно оговаривается. А в самолете есть два радиокомпаса, только и умеющих, что указывать стрелками на тот маяк, на который они настроены. И как только обе стрелочки оказываются направлены в одну точку, мы понимаем, что мы находимся по оси ВПП.
Сложность тут в том, чтобы выйти на эту ось на нужном удалении и снижаться с нужной вертикальной скоростью. Впрочем, наша FMGS готова нам подсказать и то и другое, а, если что, требуемые вертикальные скорости обычно публикуются на схемах. Окончательно правильность своего положения контролируем по пролету приводов. Дальний хорошо бы пройти на высоте 200 метров (600-700 футов) , а ближний - 60 метров (200-250 футов). Простой ли это способ? Да так себе, посложнее первых двух... Надежный? Ммм, не очень - легко можно ошибиться, особенно на менее продвинутых самолетах чем наш. Что и случалось иногда, к сожалению...
Есть, кстати, еще вариант захода с использованием всего одного привода. Принципиально он не отличается, просто летим на этот привод с заданным курсом (точнее - путевым углом), в момент его пролета контролируем свою высоту и все - мы в дамках.
Способ N4. Заход на радиомаяк. VOR - approach.
Способ этот очень похож на предыдущий с одним только отличием - если приводной маяк стоял по оси ВПП, то этот стоит рядом с ней, примерно в районе ее центра. Поэтому и заходим мы на него с курсом ОТЛИЧАЮЩИМСЯ от посадочного! Наша задача - увидеть полосу визуально и вовремя довернуть на посадочный курс. Не увидели вовремя - "давай, до свиданья" - уходим на второй круг.
Что объединяет эти способы? А то, что все они являются недостаточно точными, то есть требуют достаточно высоких метеоминимумов. Примерно 600-800 футов, то есть 200-300 метров. Если облачность опускается ниже - извините, но нам дорога на запасной. Снижение ниже минимума без видимости земли это преступление и прямой путь в... отчет о расследовании катастроф. Однако, мы все-таки ухитряемся сесть и при минимальной видимости и даже вообще без нее, для этого применяются так называемые "точные" заходы. Но об этом - чуть позже.