
Зачем же нам пытаться ставить частотный преобразователь в связку с синхронным двигателем? Это первый вопрос, который должен появляться в голове, когда вы читаете название данной статьи.
Ответ таков: синхронные электродвигатели имеют несложное устройство, и после выхода на требуемую скорость они работают стабильно. При работе на постоянной скорости они имеют КПД больше, чем у асинхронного двигателя (АД). Но существуют две основных проблемы. Первая – данный двигатель, как и в случае с АД, для управления скоростью на валу требует использования дополнительного оборудования. Вторая – это невозможность запускать двигатель напрямую от сети. А вот если подсоединить к данному двигателю частотный преобразователь, то обе проблемы решатся. Получается, при использовании системы ПЧ-СД мы можем достичь большего КПД в системе, чем при использовании в системе ПЧ-АД.
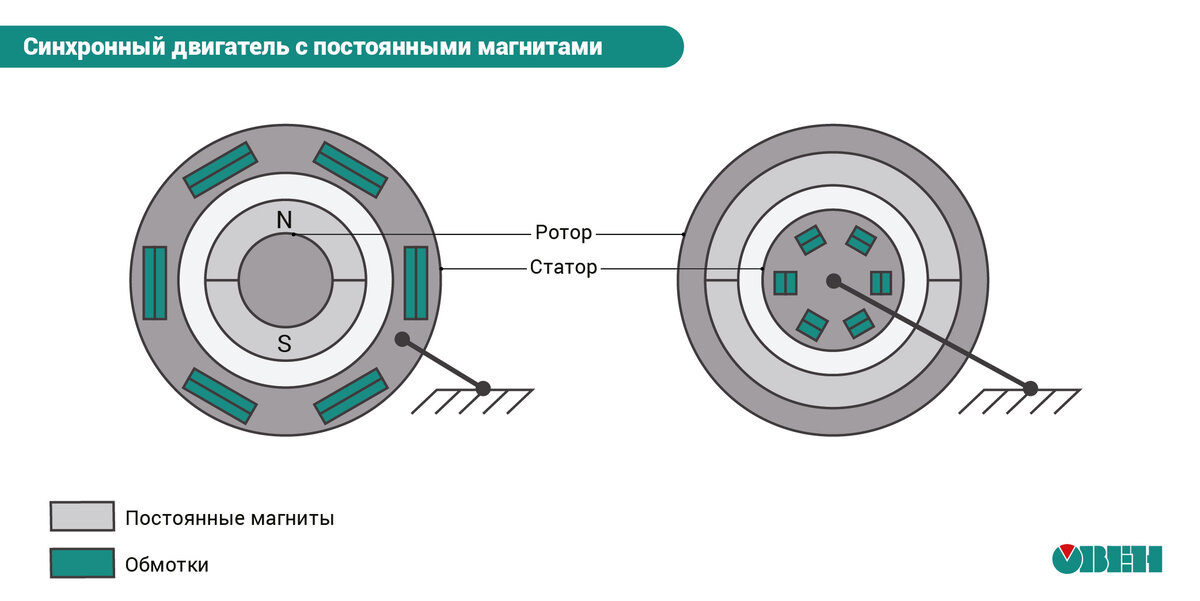
Особенностью работы синхронного двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что ротор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом. Питается данная машина так же, как и асинхронный двигатель, синусоидальным током.
Так как преобразователь частоты с помощью ШИМ-модуляции создаёт сигнал на клеммах двигателя, который схож с синусоидой, то следует логичный вывод, что ПЧВ может работать с СД. Но здесь следует уточнить, что наш частотный преобразователь может работать только с СД с постоянными магнитами, так как в случае с электромагнитом на роторе нам бы следовало создавать ещё один канал управления для получения нужной величины тока в электромагните.
Получается, что на выходе нашего преобразователя мы имеем ШИМ-модуляцию. Далее сигнал проходит через клеммы двигателя, и в силу фильтрации за счёт внутренних параметров двигателя имеет форму, схожую с синусоидальным током. Регулируя частоту ШИМ-модуляции, мы регулируем частоту тока, подаваемую на двигатель, и тем самым регулируем скорость двигателя.
Из-за схожести в принципе работы двух двигателей мы можем использовать наш преобразователь частоты совместно с синхронным двигателем с постоянными магнитами.
Если мы разобрались с принципом работы этой системы, то можем приступить к реализации задачи, а именно: подключение двигателя и параметрирование преобразователя частоты. Подключение силовых клемм синхронного двигателя ничем не отличается от подключения асинхронного двигателя. На выходе преобразователя находятся 3 фазы, которые и подключаются к двигателю.
При настройке частотного преобразователя следует для начала указать, что подключаемый двигатель — это синхронный двигатель с постоянными магнитами и указать его основные паспортные данные, такие как:
· Мощность двигателя.
· Напряжение двигателя.
· Частота двигателя.
· Ток двигателя.
· Номинальная скорость двигателя.
· Длительный номинальный момент.
Также для корректной настройки следует указать длину подключаемого кабеля и дополнительные параметры, такие как:
· Противо-ЭДС при 1000 об/мин.
· Насыщение по осям d и q.
· Коэффициент усиления обнаружения положения.
· Ток при минимальной индуктивности d и q.
Все эти параметры есть на шильдике или в паспорте двигателя, который идёт в комплекте с самим двигателем.
После ввода данных параметров следует провести автоматическую адаптацию двигателя.
Автоматическая адаптация двигателя или ААД – процесс расчёта всех наведённых параметров самим преобразователем на основе известных данных. Т.е., используя известные параметры, преобразователь частоты сам подбирает оптимальный способ управления.
Для достижения максимального КПД системы и исключения случая опрокидывания ротора рекомендуется применять систему управления с замкнутым контуром ПИ-регулятора по сигналу энкодера.