Устройство и принцип работы асинхронного двигателя с фазным ротором и с короткозамкнутым ротором в целом похожи, основные отличия лежат в конструкции этого самого ротора, схеме подключения и принципе запуска.
Устройство и принцип работы
Основные элементы асинхронной машины — это статор и ротор. Статор – это неподвижный элемент электрической машины, который состоит из сердечника с обмоткой. В статор помещается вращающийся ротор — вал, на котором расположен сердечник с короткозамкнутой (у АД с КЗ-ротором) или изолированной обмоткой (у АД с фазным ротором).
Так как магнитный поток в асинхронном двигателе переменный, сердечник статора изготавливается шихтованными, то есть он состоит из набора тонких пластин, которые изолируются друг от друга окалиной и покрываются лаком. Это нужно для снижения вихревых токов и потерь.
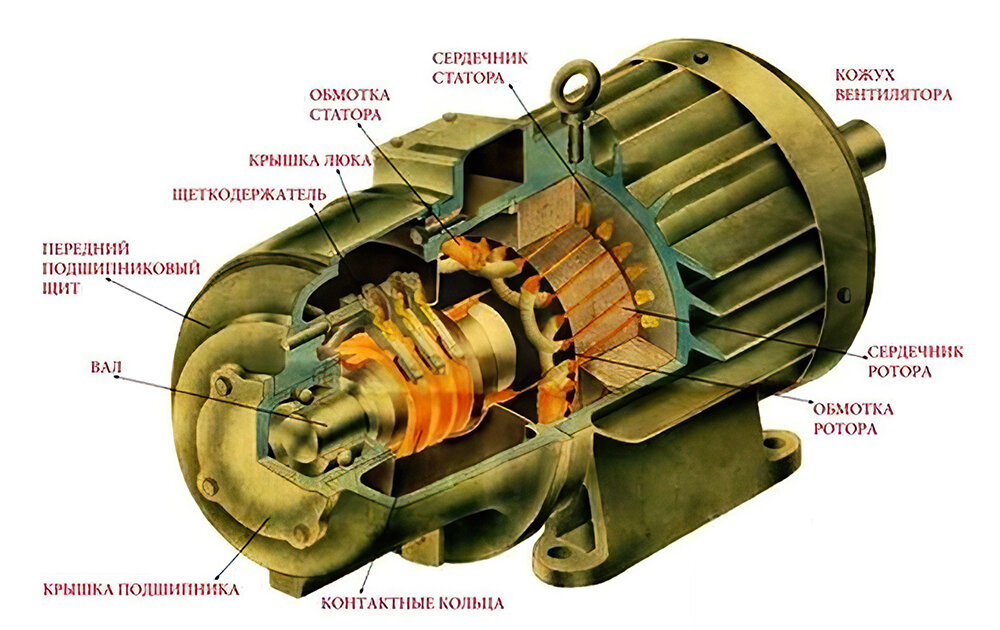
В сердечнике есть пазы, в которые укладывается трёхфазная обмотка. А сам сердечник запрессовывается в литую станину – корпус двигателя.
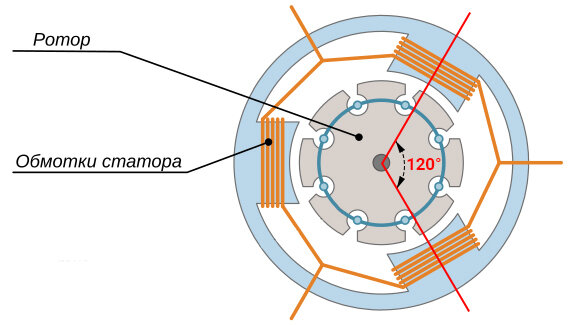
Обмотка статора – состоит из катушек, намотанных медным проводником и расположенных в статоре так, что их геометрические оси сдвинуты в пространстве друг относительно друга на 120 градусов, как и фазы в трёхфазной системе питания. Обмотки статора соединяются по схеме звезды или треугольника.
На фазном роторе размещены три изолированные обмотки, соединённые по схеме звезды. Сердечник ротора также, как и статора набирается из штампованных листов электротехнической стали. Свободные концы обмоток выведены к контактным кольцам. Для съёма тока с колец используются щётки, закреплённые на щёткодержателях.
Принцип действия асинхронного двигателя с фазным ротором такой же, как и у двигателя с короткозамкнутым ротором— вращающееся магнитное поле статора пересекая проводники обмотки ротора индуктирует в них ЭДС. Если обмотка ротора замкнута, то ЭДС порождает электрический ток. В результате взаимодействия этого тока с магнитным полем статора возникает электромагнитный момент и ротор начинает вращаться.
Частота вращения магнитного поля или синхронная частота n1 рассчитывается по формуле:
n1=60f/p ,
где f – частота питающей сети, а p – число пар полюсов обмотки статора. У двигателя с одной парой полюсов она равна 3000 об/мин.
Частота вращения ротора n2 немного ниже, и её можно посчитать по формуле:
n2=n1*(1-S )=(f1×60/p)(1-s), где n1 – синхронная частота, S – скольжение.
Скольжение S – это величина, которая выражает разницу между частотой вращения вала и частотой вращения магнитного поля статора у асинхронного двигателя, рассчитывается по формуле:
S =((n1-n2)/n1)*100%.
Величина скольжения у разных двигателей отличается, зачастую указывается на шильдике и обычно лежит в пределах 2-8%.
Итак, частота вращения ротора любого АД определяется скольжением, частотой питающей сети и числом пар полюсов в обмотке статора.
Начнём с конца — изменить число полюсов в обмотке односкоростного двигателя в процессе работы не получится — для этого есть многоскоростные двигатели, у которых изначально обмотка рассчитана на переключения.
Для изменения частоты тока используют частотные преобразователи. Раньше они не были слишком распространены из-за высокой стоимости, но в последнее время используются всё чаще и всё в большем количестве задач.
Изменять скольжение для регулировки частоты вращения АД можно:
- Изменением питающего напряжения, подводимого к обмотке статора.
- Нарушением симметрии питающего напряжения.
- Изменением активного сопротивления обмотки ротора.
Регулировка частоты вращения двигателя изменением скольжения возможно только для нагруженного двигателя. То есть на холостом ходу его вал всё равно будет вращаться со скоростью близкой к номинальной.
Величину питающего напряжения обычно изменяют с помощью регулировочных автотрансформаторов или включают реакторы в разрыв линейных проводов (последовательно с обмоткой статора), такой способ используется с асинхронными двигателями с короткозамкнутым ротором.
Изменение скольжения за счёт изменения активного сопротивления обмотки ротора возможно только на асинхронных двигателях с фазным ротором, как отмечалось выше, к кольцам ротора подключаются, через щётки, резисторы или реостат. При движении бегунка реостата изменяется его сопротивление, так как реостат подключён к обмотке ротора, то при этом изменяется активное сопротивление в цепи ротора.
При увеличении активного сопротивления обмотки ротора увеличивается скольжение, соответствующее заданному нагрузочному моменту. Говоря простым языком – при одной и той же нагрузке на двигатель, при увеличении скольжения будут уменьшаться обороты ротора. По той же причине при увеличении активного сопротивления ротора увеличивается и пусковой момент.
Зависимость скольжения от сопротивления определяется по формуле:
Предлагаю не вдаваться в подробности и не рассматривать эти вопросы глубже, чтобы не увеличивать объём статьи, а просто запомнить – чем больше активное сопротивление обмоток – тем меньше обороты ротора при той же нагрузке. Давайте перейдём к практике, а именно рассмотрим схему подключения.
Схема подключения
Разбирать схему включения асинхронного двигателя с фазным ротором будем на примере схемы плавного пуска.
Схему условно можно разделить на 2 цепи – силовую и управления. Силовая цепь состоит из автоматического выключателя QF , контактора КМ1, теплового реле КК, включённого в разрыв питающего двигатель кабеля и самого двигателя. Контактор КМ1 подаёт напряжение на обмотку статора. Контакторы КМ2, КМ3 и КМ4 шунтируют (выводят из цепи) резисторы, соединённые с обмоткой ротора. Резисторы, кстати, соединяются тоже по схеме звезды.
Цепь управления состоит из катушки контактора двигателя КМ1, подключённой по стандартной схеме с самоподхватом через нормально замкнутый контакт теплового реле КК. И цепи управления контакторами резисторов КМ2, КМ3 и КМ4, реле времени КТ1, КТ2 и КТ3. При срабатывании теплового реле, контакт КК разомкнётся и отключит контактор КМ1 и все цепи обесточатся – и двигатель, и цепь управления.
При включении автомата QF напряжение через нормально замкнутую кнопку SB2 (СТОП) поступает на нормально разомкнутую кнопку SB1 (ПУСК). При нажатии на кнопку SB1 напряжение подаётся на контактор катушку контактора КМ1, в результате чего нормально разомкнутые контакты КМ1.1, КМ1.2.
КМ1.1 запитает цепь из реле времени КТ1, КТ2, КТ3 и контакторов управляющих резисторами в цепи ротора КМ2, КМ3, КМ4.
КМ1.2 замкнётся и будет удерживать контактор КМ1 во включённом состоянии – это называют самоподхватом, когда контактор удерживается во включенном состоянии за счет того, что катушка питается через контакт этого же самого контактора.
Начнётся «процесс» запуска двигателя. В первый момент времени, когда вал ещё не вращается к нему подключены все сопротивления, ток ротора, наводимый вращающимся магнитным полем, будет протекать через всю цепочку, а его значение будет минимальным.
Реле времени КТ1, КТ2 и КТ3 настроены на определённую задержку времени, через которую они будут включаться. Время задержки настраиваться для каждого конкретного случая, в зависимости от режима запуска и работы двигателя, нагрузки на его валу. Поэтому опустим конкретные цифры, просто примем, что эти реле включаются одно за другим.
По истечении времени задержки КТ1 включится и включит контактор КМ2, тем самым выведет из цепи первую цепочку сопротивлений. Активное сопротивление ротора уменьшится, уменьшиться и его скольжение, а значит обороты станут больше при том же моменте.
Двигатель продолжит разворачиваться и по истечении времени задержки КТ2 сработает, включит КМ3 и выведет из цепи ротора следующую цепочку резисторов, сопротивление ротора уменьшится ещё больше, вал начнёт вращаться ещё быстрее и так далее... Такой процесс будет повторяться столько раз, сколько ступеней резисторов подключено к ротору, что вы и можете видеть на следующей анимации.
Так и происходит плавный пуск асинхронного двигателя с фазным ротором, таким образом, повышается пусковой момент и снижается пусковой ток. Но из-за того, что двигатель работает, по сути своей, как трансформатор – то ток, протекающий через резисторы ротора, преобразуется в тепло. То есть КПД двигателя в таких режимах низкая.
Аналогичным способом происходит и регулировка частоты вращения АД с фазным ротором, только цепочки резисторов подключаются/отключаются не автоматически, а вручную. Например, на грузоподъёмных кранах для этого используют командоконтроллеры.
Командоконтроллер — это коммутационный аппарат с множеством контактов, которые переключаются с помощью рычага с несколькими фиксированными положениями, как у рычага автоматической коробки передач автомобиля. При переводе рычага в каждое из положений соединяются разные группы контактов и замыкают соответствующие определённым режимам работы (скоростям) двигателя цепи.
На современных кранах используются миниатюрные и более комфортные для крановщика джойстики, кроме габаритов их конструкция ничем особо не отличается, за исключением того, что один аппарат может управлять перемещением тележки крана в разных направлениях (продольное и поперечное).
Резисторы для двигателя с фазным ротором выполняются в виде спиралей, свитых из металлических лент или проволоки (фехралевой, константановой ) и закреплённых на шасси.
Пример схемы управления двигателем грузоподъёмного механизма вы видите ниже. Здесь в средней части схемы пунктирными линиями изображены положения контактной группы командоконтроллера. В остальном схема почти аналогична рассмотренной в статье, а основные отличия в том, что вместо реле времени установлен командоконтроллер, а двигатель подключен по реверсивной схеме.
Заключение
У асинхронного двигателя с фазным ротором лучшие пусковые и регулировочные свойства, но у него больше масса, размеры и стоимость, чем у двигателя с короткозамкнутым ротором. Из-за включения резисторов в цепь ротора снижается КПД двигателя в режиме, когда ротор вращается с пониженной скоростью. Для получения большего КПД используют двигатели с преобразователями частоты.
Алексей Бартош специально для ЭТМ