Статья основана на материалах из учебного пособия, с которым читатель может ознакомиться в конце статьи. Статья несет исключительно познавательный характер.
Если у вас есть замечания по написанной статье и пожелания о выборе тематики будущих статей, в том числе продолжения раскрытия темы по данному источнику, пишите в комментарии.
Приятного чтения!
В общем случае структура технологической машины состоит из привода и исполнительного устройства, закрепленных на несущей конструкции, которой может являться корпус, станина, рама и тому подобное.
Привод в минимальной конфигурации состоит из устройства управления и двигателя приводящего в движение исполнительного устройства.
Усложняя устройство привода, в него добавляется большее число двигателей, промежуточные механизмы, устройства управления отдельными подсистемами. В конце концов у нас может получится структурная схема привода, представленная на картинке ниже.
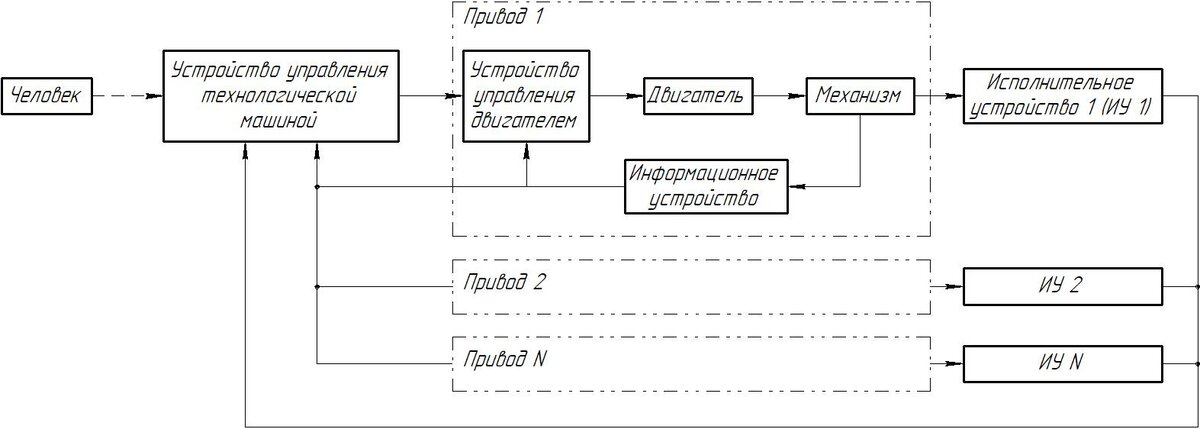
На примере человек взаимодействует с устройством управления, оно, в свою очередь, подает управляющие сигналы на приводы, приводы преобразуют сигналы с устройства управления в механическое воздействие на исполнительное устройство.
Сами же приводы, в данном случае, состоят из устройства управления двигателем, которое преобразует сигнал управления в необходимый выходной сигнал на двигатель. Двигатель, получив сигнал управления преобразует его в механическое воздействие на механизм, то есть преобразует один вид сигнала управления (электрический) в другой (механическое воздействие). Выходной сигнал механизма, механическое воздействие, является выходным сигналом привода, который идет уже на исполнительное устройство.
Информационное устройство опрашивает положение механизма через систему подключенных к механизму датчиков, преобразует полученный с них сигнал и подает его на устройство управления технологической машиной. Таким образом в данной схеме реализуется система обратной связи. Сигнал с информационного устройства формирует ошибку положения механизма, которая вычитается из сигнала на устройство управления двигателем для его доводки.
Выходной сигнал, идущий с исполнительных устройств на устройство управления технологической машиной также реализуют систему обратной связи, учитывая уже ошибку положения выходного механического звена (ВМЗ).
Теперь когда мы разобрались с основами строений структур приводов, следует обратить внимание на параметры, которыми приводы характеризуются:
1. Вид движения выходного звена. Может быть поступательным (движение штока гидроцилиндра), вращательным (движение выходного вала мотор-редуктора) или сложным плоским/пространственным (к примеру, позиционирование головки шпинделя на 3-х координатном фрезерном станке с ЧПУ).
2. Характер движения выходного звена. Может быть однонаправленным (к примеру вращение лопастей вентилятора), возвратно-поступательным или пространственным (движение точки инструмента промышленного робота-манипулятора), вибрационное (работа вибробункера).
3. Кинематические параметры движения выходного звена. Перемещения (ход s, шаг ∆s (м, мм), угол поворота φ, шаг ∆φ (рад, град)), скорости (линейная V (м/с), угловая ω (рад/с, град/сек)), ускорения (линейное a (м/с^2, мм/с^2), угловое ε (рад/с^2, град/сек^2)).
4. Диапазон регулирования. Сюда включен диапазон регулирования перемещения и диапазон регулирования скорости (к примеру, скорости вращения шпинделя токарно-винторезного станка).
5. Точность движения и остановки выходного звена. Точность позиционирования, точность воспроизведения траектории движения, точность воспроизведения скорости.
6. Динамические параметры. Здесь обозначим быстродействие привода и частотные характеристики привода.
7. Силовые параметры. Перечислим следующие силовые параметры:
Номинальное развиваемое усилие на выходном звене — сила F (Н) при поступательном движении, момент M (Нм) при вращательном движении.
Номинальная мощность — P = F*V (Вт) при поступательном движении, P = M*ω (Вт) при вращательном движении.
Удельное усилие, удельный момент и удельная мощность:

или
где m — масса привода, а v — объем, занимаемый приводом.
Перегрузочная способность:
где Fmax и Mmax — максимально допустимые действующие кратковременно (обычно несколько секунд) усилия.
8. Инерционность движущихся частей привода. К данному типу параметров относится масса m (кг) или момент инерции J (кгм^2) движущихся деталей привода и приведенная к двигателю масса mпр (кг) или приведенный момент инерции Jпр (кгм^2) движущихся деталей привода.
9. Коэффициент полезного действия (КПД) привода.
где η1, η2, ... — КПД отдельных частей привода; Pвх — мощность, потребляемая приводом; Pвых — мощность на исполнительном звене привода.
10. Надежность (безотказность) привода, ресурс (время службы), безопасность, ремонтопригодность, стоимость, доступность и др.
Заключение.
В данной статье мы пробежались по структуре и основным техническим характеристикам машин. Более подробно с техникой приводов вы можете ознакомиться из источника, по первой главе которого и была написана эта статья — Тимофеев Ал. Н. Техника приводов: учеб. пособие / Тимофеев Ал. Н., Попов А.Н., Полищук М. Н. — СПб.: Изд-во Политехн. ун-та, 2016. - 191 с.
Ссылка на источник в elibrary.ru
Бонус.
Научная статья из журнала ИЗВЕСТИЯ ТРТУ. Тема: ПРИВОД С ДВОЙНЫМ ИЗМЕНЕНИЕМ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ И УПРАВЛЕНИЕ ЭТИМ ПРИВОДОМ.
В статье обсуждается интеллектуальный привод с непрерывно меняющимся передаточным отношением и двойными свойствами. Такой тип привода особенно эффективен при использовании в машинах, рабочие элементы которых совершают старт-стопные движения, причем движения вперед и назад характеризуются различными величинами масс (моментов инерции) подвижных частей, как например, в промышленных или в шагающих роботах.