
Первый блок палитры называется Средний мотор, второй — Большой мотор. Блоки служат для управления одним мотором и имеют одинаковый функционал. Рассмотрим структуру блоков на примере блока большого мотора (рис. 1).
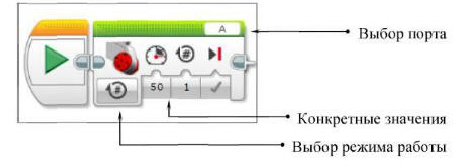
Прежде всего щёлкните по букве, обозначающей название порта, и выберите название порта, к которому подключён мотор.
Рассмотрим подробнее каждый управляющий элемент.
1. Выбор режима работы:
а) Включить (рис. 2);
Важно!
Особенность структуры программ в среде EV3 заключается в том, что для каждого действия мы обязательно должны задать условие его завершения, Например: вращать мотор 2 оборота, вращать мотор 3 секунды, проигрывать звук 1 раз. Поэтому фрагмент программы, представленный на рис. 4. будет выполняться только тогда, когда после него будет стоять условие окончания вращения мотора. Например, вращение с мощностью 50 единиц до тех пор, пока не будет нажат датчик.
Или вращение с мощностью 50 единиц до тех пор, пока не пройдет 1 секунда.
При выборе этого режима мотор работает постоянно с заданной скоростью. Скорость задаётся справа от выбора режима работы, в данном случае 50. Этот режим используется в сочетании с программными структурами, содержащими указания на условия завершения вращения. Например: ехать до тех пор. пока показания датчика не станут равны X или пока заданная переменная не примет значения Y. Подробнее мы рассмотрим эти вопросы в следующих разделах.
б) Включить на количество секунд (рис 5.)
В этом режиме мотор будет вращаться заданной скоростью установленное количество секунд. Время работы задаётся справа от задания скорости, в данном случае мотор будет крутиться вперёд со скоростью 50 единиц (или с мощностью 50% от максимальной) в течение 1 секунды.
Важно!
Не задавайте этот режим работы, если роботу необходимо проехать точное расстояние, так как’ при разных зарядах батареи за одно и то же время робот проедет разные расстояния.
в) Включить на количество градусов (рис 6.)
В приведённом примере вал мотора повернётся на 360 градусов со скоростью 50 единиц (или мощностью 50% от максимальной).
Важно!
В линейной программе блоки, следующие за блоком правления движением по градусам или оборотам, не будут выполняться, пока вал мотора не повернется на нужное количество градусов или оборотов. Не задавайте этот режим работы, если существует возможность застревания мотора. В этом случае используйте режим вращения по секундам. В случае застревания выполнение остальной программы продолжится через указанное количество секунд вращения мотора.
г) Включить на количество оборотов (рис 7.)
См. пункт "в". Один оборот = 360 градусов.
д) Выключить (рис 8.)
Блок останавливает работу мотора с резким торможением или постепенно, двигаясь накатом.
2. Выбор режима остановки мотора (рис. 9.)
В том случае, когда необходимо резко остановить вращение мотора, параметру Тормозить в конце, отвечающему за режим остановки мотора, присвоим значение Тормозить (рис. 9 а.).
Если мы хотим, чтобы после остановки движение продолжалось по инерции и плавно завершилось, установите значение параметра Двигаться накатом (рис. 9 б.).
Если вам понравилась данная статья, то не забудь подписаться и поставить лайк!
Также читайте другие статьи на этом канале:
Обзор на среду программирования Lego Mindstorms EV3
Способы подключения робота к компьютеру
Краткая характеристика роботизированных платформ.