Содержание: Пролог | Первые проблемы | Глубина хода | Глючный датчик | Дела магнитные | Физика с географией | Причины и следствия
За удержание торпеды на необходимой глубине отвечают горизонтальные рули, связанные с датчиком давления. Сравнительно простая система с обратной связью корректирует угол наклона горизонтальных рулей таким образом, чтобы удерживать торпеду в зоне давления, соответствующего выбранной глубине. При нулевой скорости всё просто: на датчик действует лишь гидростатическое давление, пропорциональное глубине погружения.
Но торпеда движется, а в этом случае начинает работать дополнительный фактор — гидродинамическое давление у поверхности корпуса. Учитывать его гораздо сложнее, поскольку оно связано со скоростью обтекания, а эта скорость на разных участках поверхности корпуса различна. Соответственно, гидродинамическое давление на различных участках корпуса может становиться либо выше, либо ниже гидростатического.
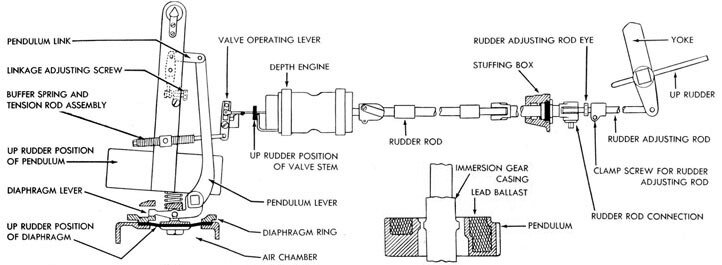
Система обратной связи между датчиком давления и рулевой машиной горизонтальных рулей была, как это сейчас называется, аналоговой, причём в самом примитивном варианте — механической. Поэтому датчик располагался вблизи этой машины в конической хвостовой части торпеды (в одном блоке с гироскопом и рулевой машиной рулей направления). И забортная вода, по которой измерялось давление, поступала в него по каналу, выходящему на поверхность корпуса торпеды по кратчайшему расстоянию.
То есть, входное отверстие располагалось также в конической хвостовой части — как раз там, где гидродинамическое давление становилось заметно меньше гидростатического. В результате, по мере разгона торпеды датчику начинало «казаться», что он находится ближе к поверхности, чем было на самом деле. Запускалась обратная связь, и рули глубины уводили торпеду ниже.
В случае торпед предыдущего поколения, разработанных ещё во времена Первой мировой и имевших максимальную скорость в 35 узлов [65 км/ч], разницей между гидростатическим и гидродинамическим давлением ещё можно было пренебречь, и о ней в тот момент даже не задумывались. Не вспомнили об этом и при создании намного более скоростных торпед следующего поколения, оставив на них надёжную и проверенную систему контроля глубины их предшественников. Зачем улучшать то, что и так прекрасно работает?
Однако гидродинамическое давление пропорционально скорости обтекания в квадрате, поэтому с увеличением максимальной скорости новых торпед сразу на 11 узлов [20,4 км/ч] разница между гидростатическим и гидродинамическим давлением начала приводить к ошибкам определения глубины, измеряемым уже метрами.
Конечно же, эту проблему можно было выявить ещё на этапе испытаний прототипов — например, тем же примитивным способом с сетью-мишенью, которым воспользовались подчинённые контр-адмирала Локвуда. Однако подобные испытания связаны с риском повреждения или даже потери торпеды, стоимость которой даже в серии составляла более 10 000 тогдашних долларов. Для понимания порядка цен: стоимость в серии всем известного среднего танка М4 «Шерман» составляла около 45 000 долларов.
А на момент испытаний торпед Mark 14 на дворе начиналась «Великая депрессия», вызвавшая серьёзные проблемы с финансированием. Поэтому в условиях, когда «не на что было даже покрасить стены в цехах», испытания глубины хода проводились в «щадящем режиме»: данные по глубине брались с самописца, установленного в испытательной носовой части торпеды.
Сигнал на этот самописец поступал с собственного датчика давления, заборное отверстие которого находилось сразу за заострённым носом торпеды, где при движении происходит так называемый «срыв потока», и также возникает «карман» пониженного гидродинамического давления. Иными словами, работу одного неправильно работавшего датчика контролировали с помощью другого неправильно работавшего датчика.
Ещё одним слабым место в испытаниях прототипов было то, что они проводились со специальной «торпедной баржи» оборудованной лишь надводными торпедными аппаратами, которые, по понятным причинам, никак не могли создать условий запуска из затопляемых торпедных аппаратов подводных лодок. Это тоже приводило к появлению погрешностей, пусть и не таких серьёзных, как вызванных отсутствием учёта гидродинамического давления.
26 августа 1942 года командирам подлодок ВМС США был разослан циркулярный документ, определявший новые установки глубины хода с учётом выявленных погрешностей. Однако это было лишь временным решением. Тем временем, получившие чувствительный удар по репутации специалисты Торпедной станции в Ньюпорте развернули бурную деятельность. Ими было проведено более 250 испытательных пусков, причём на этот раз в качестве «платформы» использовалась не торпедная баржа, а проходившие сдаточные испытания подлодки SS-233 «Херринг» и SS-255 «Хэдеу».
К концу осени 1942 года в передовые части начали поступать инструкции и ремкомплекты, позволявшие на месте, в условиях торпедных мастерских баз подлодок, исправить ошибку с определением глубины хода имевшихся торпед уже на уровне «железа». Заборное отверстие датчика давления переносилось на поверхность цилиндрической части корпуса, где разница между гидростатическим и гидродинамическим давлением была минимальна.
Модифицированные таким образом торпеды получали дополнительный индекс «А» (например, Mark 14–2A), а следующая модификация, Mark 14–3A, выпускалась уже с этими изменениями. Спустя какой-то год после начала Тихоокеанской войны первое из «врождённых заболеваний» торпед Mark 14 было, наконец, успешно вылечено.
Содержание: Пролог | Первые проблемы | Глубина хода | Глючный датчик | Дела магнитные | Физика с географией | Причины и следствия



















