С точки зрения теории, каждый зубчатый механизм можно представить как центроидный. Такой механизм (рис. 7.1) содержит ведущую 1 и ведомую 2 центроиды. При условии идеального трения ведущая центроида 1 вращает ведомую 2 по следующей закономерности

где φ1 – угол поворота ведущей центроиды 1, град (рад); φ2 – угол, на который поворачивается ведомая центроида 2 за время поворота ведущей на угол φ1, град (рад); d1 и d2 – диаметры центроид, м (мм).
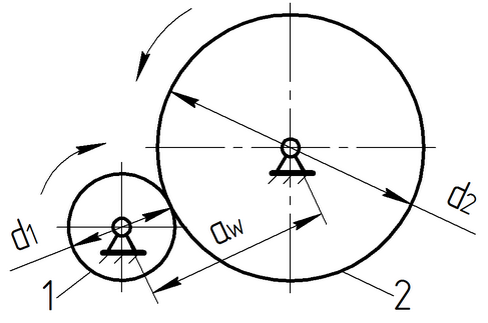
Закономерность (7.1) является передаточным числом механизма; обозначается буквой U или U12 (с учетом нумерации звеньев)
из которой следует, что за один оборот ведущей центроиды 1, ведомая 2 повернется на угол
Представленный центроидный механизм полностью аналогичен фрикционному. Следовательно, его работа возможна только при условии идеального трения (без проскальзывания). Поскольку это недостижимо, на практике центроиды оснащают зубьями, что в итоге дает зубчатое зацепление.
Зубчатые механизмы (передачи) содержат, как правило, ведущее зубчатое колесо (шестерню) и ведомое. Наиболее известными зубчатыми передачами являются цилиндрическая (рис. 7.2, а), цилиндрическая внутреннего зацепления (рис. 7.2, б), коническая (рис. 7.2, в) и червячная (рис. 7.2, г). Цилиндрическая и коническая передачи могут изготавливаться с фигурным зубом (рис. 7.3). Кроме того, цилиндрическая передача, состоящая из зубчатого колеса и рейки, может обеспечивать поступательное движение (рис. 7.4).
Основными геометрическими параметрами цилиндрического зубчатого колеса являются (рис. 7.5):
– число зубьев z;
– шаг по делительной окружности p, мм;
– диаметр делительной окружности d, мм;
– диаметр окружности впадин df, мм;
– диаметр окружности вершин da, мм;
– диаметр начальной окружности dw, мм.
В качестве параметра, характеризующего типоразмер зубчатого колеса, принято использовать модуль m, мм – отношение шага p по делительной окружности к числу π
Стандартный ряд модулей предусматривает следующие значения: 1,5 мм; 2 мм; 2,5 мм; 3 мм; 4 мм; 5 мм; 6 мм; 8 мм и др. (ГОСТ 9563-60).
Используя модуль, можно рассчитать необходимые размеры каждого из пары зубчатых колес:
– диаметры делительных окружностей (при прямом зубе)
– диаметры окружностей впадин (без смещения)
где 1,25 – стандартный коэффициент высоты ножки зуба.
– диаметры окружностей вершин (без смещения)
где 1 – стандартный коэффициент высоты головки зуба.
О начальных окружностях будет сказано ниже.
В зубчатом механизме со стандартными параметрами (без смещения) в роли центроид выступают делительные окружности d1 и d2. В таком случае межосевое расстояние aw (рис. 7.1) может быть рассчитано по формуле
Поскольку длина делительной окружности равна произведению числа зубьев на их шаг по делительной окружности: z×p, то передаточное число (7.2) можно представить в следующем виде
Учитывая, что угловая скорость равна отношению угла φ ко времени t: ω = φ / t, а отсчет отрицательных углов осуществляют в направлении вращения по часовой стрелке, при кинематических расчетах возможно преобразование формулы (7.3)
где знак «минус» говорит о том, что колеса на рис. 7.1 вращаются в противоположные стороны.
Выражение (7.13) принято называть передаточным отношением. В отличие от передаточного числа здесь показывается направление движения: при положительном числе – в одну и ту же сторону, а при отрицательном – в разные. В передачах внутреннего зацепления (рис. 7.2, б), где направление вращения колес совпадает, формула (7.13) будет положительной. Для удобства расчета передаточное отношение при наружном зацеплении можно также записать через число зубьев
В основе зубчатого профиля лежит эвольвента – траектория качения развертки основной окружности радиусом rb по этой же окружности (рис. 7.6). Для построения следует взять требуемую часть окружности (либо окружность целиком). Затем развертываемая часть делится на равные дуги, например, на 12 равных дуг: 0-1, 1-2, 2-3 и т.д. Каждую из полученных точек следует соединить с центром окружности C, после чего из каждой точки окружности следует провести перпендикуляры к полученным отрезкам. Например:
- прямая 1-1` является перпендикуляром к прямой С-1; длина прямой 1-1` равняется длине дуги 0-1; прямая 1-1` является радиусом кривизны эвольвенты в точке 1`;
- прямая 2-2` является перпендикуляром к прямой С-2; длина прямой 2-2` равняется длине дуги 0-2; прямая 2-2` является радиусом кривизны эвольвенты в точке 2`;
...
- прямая 0-0`` является перпендикуляром к прямой С-0; длина прямой 0-0`` равняется длине основной окружности; прямая 0-0`` является радиусом кривизны эвольвенты в точке 0``.
Таким образом получается эвольвента 0-1`-2`...0``.
Основную окружность также называют эволютой. Радиусы основных окружностей в зубчатом зацеплении рассчитывают по следующим формулам
где α = 20° – стандартный угол профиля; r1 и r2 – радиусы делительных окружностей, рассчитываемые по формулам
Для зубчатого колеса используется только часть эвольвенты у ее основания. Рекомендуемый диапазон расположен ориентировочно на интервале 1`-2` (рис. 7.6).
На рис. 7.7 показано расположение окружностей зубчатого колеса II, имеющего 30 зубьев без смещения. В качестве сопряженной детали здесь показана рейка I. Рабочий участок зуба зубчатого колеса начинается выше основной окружности. Точка контакта зуба колеса II с зубом рейки I перемещается от точки начала контакта a до точки окончания контакта b.
На рис. 7.8 показано расположение окружностей зубчатого колеса II, имеющего 12 зубьев без смещения. Рабочий участок зуба зубчатого колеса здесь начинается от основной окружности. Это объясняется тем, что точка контакта в рассматриваемом случае проходит через точку A – точку начала построения эвольвенты, расположенную на основной окружности. Такое положение рабочего участка является недопустимым, поскольку:
- близкий к нулю радиус кривизны эвольвенты способствует высоким коэффициентам удельного скольжения и удельного давления;
- подрезается ножка зуба колеса (рис. 7.9) – толщина ножки Sx становится меньше толщины зуба по делительной окружности Sw;
- у зубьев колеса сокращается длина рабочего участка.
Приведенные неблагоприятные явления присуще зубчатым колесам с малым числом зубьев. Объясняется это тем, что с уменьшением числа зубьев, основная окружность будет сдвигаться от окружности впадин к делительной окружности. Этот сдвиг заметен из рассмотрения рис. 7.7 и 7.8.
Решением описанной проблемы является увеличение диаметра заготовки зубчатого колеса и смещение режущего инструмента на величину
где x – коэффициент смещения режущего инструмента.
В результате, для зубчатого колеса II, имеющего 12 зубьев со смещением, рабочий участок существенно увеличится (рис. 7.10) по сравнению с картиной без смещения (рис. 7.8).
Недостатками смещения являются:
- возможность заострения головки зуба;
- уменьшение высоты зуба, в том числе рабочего участка.
Заострением считается случай, когда
где Sa – толщина зуба по окружности вершин, мм, а если учитывать способ термообработки зубчатых колес, то при цементации этот показатель возрастает до
что объясняется склонностью к скалыванию насыщенных углеродом вершин зубьев.
ГОСТ 16532-70 рекомендует следующие значения коэффициентов смещения для шестерни x1 и для колеса x2
при числе зубьев
Геометрические параметры прямозубого зубчатого зацепления, состоящего из пары зубчатых колес (рис. 7.2, а), с учетом смещения при незаданном межосевом расстоянии будут определяться следующим образом.
В зацеплении зубчатого колеса с рейкой (рис. 7.4) угол профиля α всегда равен 20°, а в зацеплении двух зубчатых колес со смещением действительное значение угла профиля следует определять через инволюту (с точностью 5 знаков после запятой)
где inw α = 0,0149044 – инволюта стандартного угла профиля α.
Действительный угол профиля αw по формуле Ченга, град
Для проверки правильности расчета можно использовать следующую зависимость
что должно получиться равным выражению (7.22).
Межосевое расстояние aw, мм
Радиусы основных окружностей rb1 и rb2 рассчитывают по формулам (7.15) и (7.16); радиусы делительных окружностей r1 и r2 – по формулам (7.17) и (7.18).
Радиусы окружностей впадин rf1 и rf2, мм
где 1 – коэффициент высоты головки зуба; 0,25 – коэффициент радиального зазора.
Радиусы окружностей вершин ra1 и ra2, мм
Шаг по делительной окружности (из формулы (7.4)) p, мм
Толщины зубьев S1 и S2, мм, по делительным окружностям
Угловые шаги Ф1 и Ф2, град
Угол профиля также называют углом зацепления или углом давления в зубчатом механизме.
В случае косозубой зубчатой передачи (рис. 7.3, а) угол профиля будет определяться
где β – угол наклона зубьев, град, а инволюта действительного угла профиля
где inw αt = tan αt – αt×π/180⁰ – инволюта угла профиля для косозубой зубчатой передачи.
Кроме того, для косозубой зубчатой передачи отличаются зависимости для расчета межосевого расстояния, радиусов делительных и основных окружностей
При обратной разработке зубчатой передачи с физической модели (реверс-инжиниринг) следует учитывать, что большинство цилиндрических зубчатых передач проектируют под целочисленное межосевое расстояние (часто кратное 5 или 10). В таком случае для цилиндрической косозубой передачи действительный угол профиля будет выражен из формулы (7.37)
а для цилиндрической прямозубой передачи – из формулы (7.25)
Коэффициенты смещения x1 + x2 для косозубой (7.44) и прямозубой (7.45) цилиндрических передач
Полученное значение суммы x1 + x2 следует распределять:
- поровну для каждого колеса в случае, когда у них одинаковое число зубьев;
- с приоритетом для колеса с меньшим числом зубьев (например, если сумма (x1 + x2) равна 0,54, а числа зубьев колес z1 = 14 и z2 = 30, то х1 можно принять 0,45, а х2 = 0,54 – 0,45 = 0,09).
Построение картины эвольвентного зацепления колес разобрано на следующих примерах.
Пример. Прямозубая цилиндрическая передача (рис. 7.2, а). Исходные данные: z1 = 16, z2 = 31, m = 2 мм.
Поскольку z1 = 10...30, а z2 > 30, коэффициенты смещения согласно ГОСТ 16532-70:
- для колеса 1 х1 = 0,5;
- для колеса 2 х2 = 0.
Результаты расчета геометрических параметров приведены в табл. 7.1. В эту таблицу входит коэффициент перекрытия εα – отношение угла перекрытия к угловому шагу (угол перекрытия – это угол на протяжении которого осуществляется контакт пары зубьев).
где tan αa1 и tan αa2 – углы профиля на окружности вершин
Допускаемые значения коэффициента перекрытия:
- εα ≥ 1,2 – для цилиндрической прямозубой передачи;
- εα ≥ 1,3 – для конической прямозубой передачи;
εα ≥ 1 – для цилиндрической косозубой передачи.
Этапы построения картины эвольвентного зацепления колес (рис. 7.11).
1. Задается масштабный коэффициент построения
где <h> – предполагаемая высота зуба на чертеже, мм. Полученное значение масштабного коэффициента допускается округлять до более удобных значений.
2. Необходимые геометрические параметры делятся на принятый масштабный коэффициент μl = 0,17 мм/мм (табл. 7.2).
3. Намечаются точки О1 и О2 на расстоянии <aw>.
4. Проводятся дуги всех окружностей колес.
5. Проводятся отрезки О1А и О2В под действительным углом профиля (углом зацепления) αw к межосевой линии О1О2. Соединяются точки А и В. Линия АВ называется линией зацепления. Эту линию можно также построить как касательную к окружностям <rb1> и <rb2>.
6. Отмечается точка P (полюс зацепления) – место пересечения линий О1О2 и AB.
7. Отрезок AP делится на определенное количество частей, например, на три: AP / 3.
8. По обе стороны от точки A ставятся точки 1, 2, 4, 5, 6, отстоящие на расстоянии AP / 3 друг от друга по окружности <rb1>. Точка 3 находится в точке A.
9. Каждая из полученных точек соединяется с центром O1.
10. Из каждой точки (кроме точки 3, A) проводится перпендикуляр к полученным отрезкам. Длина перпендикуляра равняется x × AP / 3, где x – номер точки.
11. Концы перпендикуляров, соединенные плавной кривой, являются эвольвентой. Верхняя часть эвольвенты ограничивается окружностью <ra1>, а нижняя ее часть соединяется посредством радиальной прямой с галтелью у окружности <rf1>. Радиус галтели
12. По окружности <r1> от эвольвенты отмеряется половина толщины <S1> и проводится ось симметрии зуба.
13. Вторая половина зуба строится путем копирования построенной части относительно проведенной осевой линии. При ручном построении следует изготовить шаблон половины зуба.
14. Используя угловой шаг, проводятся осевые линии других зубьев, относительно которых также строятся их половины.
15. Для построения зубьев второго колеса следует повторить этапы 7-14. В рассматриваемом примере при построении эвольвенты зуба первого колеса понадобилось 6 точек, при построении эвольвенты зуба второго колеса – 4 точки.
16. После построения зубьев второго колеса в месте пересечения окружности <ra2> с линией AB показывается точка a, а в месте пересечения окружности <ra1> с линией AB – точка b. Полученная линия ab называется активной линией зацепления, на протяжении которой осуществляется контакт зубьев.
17. Из точки O1 радиусом O1a и из точки O2 радиусом O2b проводятся дуги до эвольвент зубьев, находящихся в контакте. От построенных дуг строятся рабочие участки – на чертеже они заштрихованы.
Видеоинструкция по построению
Коэффициенты относительного скольжения характеризуют влияние геометрии зубьев на износ профилей. Величины коэффициентов определяются по формулам:
где l1max – коэффициент относительного скольжения ножки зуба первого колеса; l2max – коэффициент относительного скольжения ножки зуба второго колеса; l1min – коэффициент относительного скольжения головки зуба первого колеса; l2min – коэффициент относительного скольжения головки зуба второго колеса; aP, bP, AP, BP – отрезки с чертежа (здесь AP и BP – радиусы кривизны эвольвент, находящихся в точке P), мм; U12 - передаточное число (всегда положительное по определению).
Для рассматриваемого примера значения коэффициентов относительного скольжения приведены в табл. 7.3.
Для построения диаграммы коэффициентов относительного скольжения (рис. 7.11) необходимо переписать формулы (7.51)-(7.54) в следующем виде
где x – расстояние, варьируемое от плюс AP до минус BP (точка P – нулевая точка отсчета по оси абсцисс).
Кроме того, по результатам построения картины эвольвентного зацепления колес рекомендуется проверить коэффициент перекрытия
где <ab> – величина активной линии зацепления на чертеже, мм.
Полученное значение приближенно равно коэффициенту перекрытия (εα = 1,3962) в табл. 7.1.
Из картины зацепления видно, что в точке P образуются окружности радиусами <rw1> и <rw2>. Это начальные окружности. Они появляются когда сумма коэффициентов смещения (x1 + x2) не равна 0 и представляют собой центроиды, аналогичные центроидам 1 и 2 на рис. 7.1.