В статье рассказано о промышленных роботах-манипуляторах и типах сервоприводов, которые для них применяются. Показано, какое применение находит робототехника в современной медицине.
Изобретение электродвигателей постоянного тока, которое относят к 1833 году, стало вехой в истории электротехники. Но только спустя 130 лет, с появлением полупроводников, началась эпоха приводов постоянного тока, или сервоприводов, – систем, в состав которых наряду с электродвигателем входят редукторы, контроллеры и датчики, позволяющие с высокой точностью управлять движением электродвигателя. Сегодня с помощью сервоприводов работает самое разное оборудование и установки. Но, пожалуй, наиболее яркими примерами применения сервоприводов можно назвать робототехнику и медицинское оборудование. Их мы и рассмотрим в статье.
Промышленные роботы-манипуляторы
Последние несколько десятилетий робототехника стремительно развивается. Прежде всего, роботы используются на автоматизированном производстве, где благодаря им многократно наращиваются производственные мощности и повышается качество продукции. Промышленный робот способен выполнять сложные монотонные операции без перерыва, сохраняя высокое качество изготовления. Отдельно подчеркнем, что использование роботов позволяет значительно снизить производственный травматизм, ведь любое производство – это зона повышенного риска. А если на объекте используются опасные вещества, например, в химической промышленности, то вопрос о риске для жизни и здоровья становится особенно актуальным.
Сварку, покраску изделий, подачу материалов и компонентов, визуальный контроль и многие другие операции осуществляют роботы, и для выполнения всех этих операций требуется сервопривод, обеспечивающий точное позиционирование. Поскольку на производстве используется множество типов роботов, рассматривать их все мы не будем, ограничимся лишь роботами-манипуляторами.
Роботы-манипуляторы выполняют функции человеческих рук. Как правило, соединения их сегментов допускают вращательные и поступательные движения. Вот несколько сфер применения роботов-манипуляторов:
- в автомобилестроении с их помощью можно производить сразу несколько операций над изделием, которое перемещается по конвейеру. Роботы выполняют литье и штамповку, установку деталей, сборку, сварку и др. Таким образом, обеспечено беспрерывное производство, что повышает производственную мощность предприятия;
- при изготовлении электротехники и электронных компонентов роботы-манипуляторы, обладающие высокой точностью движений, играют большую роль. Они сокращают количество брака, который может быть допущен при ручной сборке, и ускоряют производство;
- на химических производствах, как уже упоминалось, роботов используют в целях безопасности: они позволяют свести к минимуму взаимодействие работников с химикатами.
Если при выполнении какой-то операции робот не может полностью заменить человека, используются коллаборативные роботы (коботы), предназначенные для совместной работы с человеком. Коллаборативные роботы схожи по функциональности с манипуляторами, но способны переносить гораздо меньшие нагрузки.
На рис. 1 приведена схема возможного движения робота-манипулятора для резки, сборки, шлифовки и транспортировки (в зависимости от используемых насадок) с шестью степенями свободы.
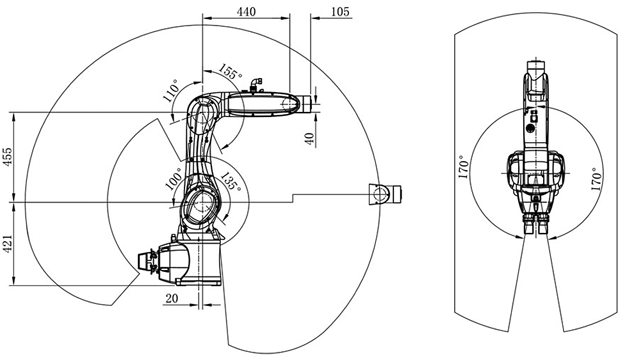
Рис. 1. Схема движения робота-манипулятора с шестью степенями свободы
На примере автомобильного завода компании Hycan (КНР) можно увидеть, как роботы-манипуляторы способны улучшить показатели производства. Этот производитель электромобилей весной 2023 года начал использовать роботов для сварки бренда COMAU. Такие роботы способны при изготовлении продукции быстро переключаться с одной модели на другую. Кроме того, их легко адаптировать к производству новых моделей, которые Hycan планирует выпускать. В состав системы входит конвейерная линия, в которую были внедрены сервоприводы позиционирования и роботы-манипуляторы для сварочных работ. Это позволило реализовать процесс сварки на нескольких изделиях одновременно, причем сократив время обработки одного изделия. В результате роботизированная линия позволила заводу увеличить производственную мощность до 200 тыс. изделий в год, а также повысила гибкость системы в целом, ее адаптивность к выпуску будущих изделий.
Элементы и работа системы
В состав сервоприводов для роботов-манипуляторов входят следующие основные элементы: бесколлекторный электродвигатель, волновой редуктор (передаточный механизм), блок управления с контроллером и датчики обратной связи. Путем механической волновой передачи сервопривод обеспечивает положение робота в соответствии с управляющим сигналом, полученным от контроллера. Контроллер же генерирует этот управляющий сигнал на основе данных, полученных от датчиков обратной связи – энкодеров, которые установлены на валу двигателя и (опционально) на выходном валу редуктора. Среди оборудования, представленного в каталоге «ИНЕЛСО», следует отметить: волновые редукторы от Han’s Motion, электродвигатели и датчики от Han’s Motor (оба предприятия являются дочерними компаниями Han’s Laser – крупного производителя станочного оборудования, а также роботов различного назначения), а также все виды энкодеров от турецкого изготовителя Fenac Technology.
Допустим, устройство программного управления вырабатывает сигнал, который определяет угол поворота одного из звеньев манипулятора. Сигнал передается на сервомотор, ответственный за это звено, а сервомотор передает его в виде силового воздействия на звено робота-манипулятора. Датчики обратной связи, входящие в состав сервопривода, получают информацию о новом положении привода, и эта информация передается в блок управления, где сравнивается с заданным значением положения. На рис. 2 показана схема устройства манипулятора с шестью звеньями.
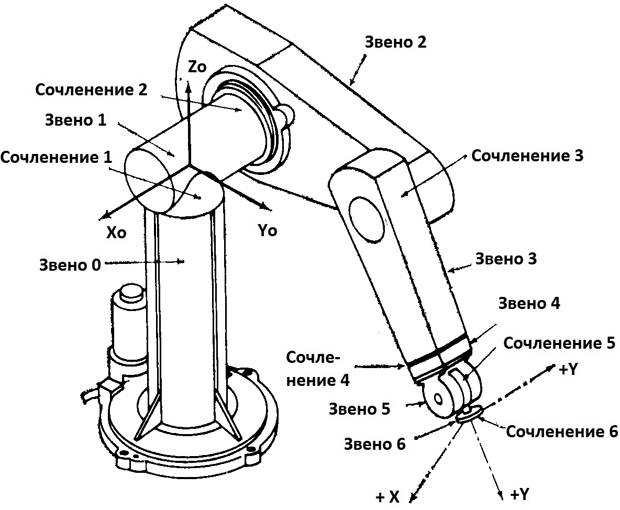
Рис. 2. Схема звеньев и сочленений робота-манипулятора
Типы сервоприводов для роботов-манипуляторов
Для промышленных роботов-манипуляторов используются сервоприводы разного типа, которые обеспечивают работу с узлами разного назначения. Так, относительно большой и мощный сервопривод с малой выходной скоростью на валу редуктора служит для поворота корпуса робота, а менее габаритные, но более скоростные сервоприводы обеспечивают движение пальцев манипулятора.
Что касается мобильных роботов-манипуляторов, то они действуют как автономная система, а значит, питаются от аккумуляторов. На сервоприводы для таких систем накладываются ограничения по габаритам и весу. Во-первых, чем меньше и при этом мощнее электродвигатель, тем быстрее сможет перемещаться управляемый им робот и тем большую грузоподъемность (полезную нагрузку) он будет иметь. Во-вторых, для автономных систем важны параметры энергопотребления: энергоэффективный электродвигатель дольше проработает на аккумуляторной батарее. Сервомоторы Assun Motor обеспечивают длительную работу автономных систем благодаря КПД, превышающему 90 %.
Раз мы перешли к автономным роботам-манипуляторам, то необходимо сказать о роботизированных конечностях для человека, разработка которых является одной из важнейших задач современной робототехники. Сегодня можно выделить два основных перспективных направления в этой области: это разработка бионических протезов для людей, лишенных конечностей, и построение систем дополнительных конечностей, предназначенных для помощи в сложной работе, например ремонтной.
Бионические протезы рук бывают односхватовыми и многосхватовыми. Односхватовые оснащены одним мотором, который обеспечивает односложное смыкание и размыкание пальцев. В протезах такого типа используется электродвигатель с редуктором, поскольку отсутствует необходимость в определении точного положения пальцев. Многосхватовые бионические протезы имеют более сложное строение: каждый их палец оснащен миниатюрным сервоприводом. Двигатели для таких изделий есть у компании Assun Motor.
В дополнительных конечностях, предназначенных для помощи в работе, тоже используется система с несколькими сервоприводами. Главные требования к подобным конструкциям: компактность и малый вес. Кроме того, сервоприводы таких изделий должны обладать высокими значениями моментных характеристик, чтобы не только выдерживать вес человека, но и иметь возможность облегчать его перемещение.
При этом основной задачей в разработке роботизированных конечностей любого типа является совершенствование системы управления. Управление бионическими протезами реализовать проще: оно осуществляется за счет считывания мио-датчиками (датчиками мышечного сигнала) электрического потенциала, который вырабатывается во время напряжения и сокращения сохранившихся мышечных тканей руки. А вот с дополнительными конечностями все сложнее, ведь человеческий мозг приспособлен управлять только двумя парами конечностей. Поэтому ученым предстоит решить задачу, как организовать совместную работу человеческого мозга и контроллера.
Медицинская робототехника
Как можно заметить, создание роботизированных конечностей тесно связано с производством медицинского оборудования, потому что цели этих отраслей во многом совпадают. Еще одним примером такого симбиоза является разработка экзоскелетов – роботизированных систем, предназначенных для восстановления моторных функций пациентов, а также для облегчения тяжелого труда, связанного с поднятием тяжестей.
Для экзоскелетов тоже используются мио-датчики. Контроллер получает с мио-датчика информацию о движении носителя, после чего подает управляющий сигнал на сервоприводы, приводящие в движение сочленение экзоскелета. Как правило, в таких системах используются небольшие сервоприводы, состоящие из двигателя (обычно – бесколлекторного) и редуктора, а также датчиков обратной связи. В частности, многие компании производят экзоскелеты с приводами в бедренном и коленном сочленениях для большей подвижности (рис. 3).
Рис. 3. Экзоскелет
В России тоже разрабатываются экзоскелеты, и достаточно успешно. Сегодня в условиях санкций для создания таких систем оптимально подойдут двигатели китайского производителя Assun Motor.
Обсудив бионические протезы и экзоскелеты, перейдем к другим роботизированным системам, которые используются в медицине. Как можно видеть по рис. 4, где указаны основные направления развития медицинской робототехники, этих систем очень много. Например, создаются механотерапевтические комплексы – тренажеры, предназначенные для разработки конечностей и суставов после травм, а также роботизированные комплексы, выполняющие некоторые виды трудоемкой медицинской работы для восстановления нарушенных функций пациента. К их числу относятся роботизированные массажные столы (рис. 5).
Рис. 4. Направления развития медицинской робототехники
Рис. 5. Манипулятор роботизированного массажного комплекса
Важно, что такие роботы способны обеспечить индивидуальный подход: они используют данные о пациентах, получая их от датчиков, и выбирают алгоритм действий, подстраиваясь под пациента. Сегодня такими разработками особенно активно занимаются в Европе.
Например, на рис. 6 показан реабилитационный комплекс, предназначенный для восстановления локомоторных функций кистей рук и пальцев. По принципу работы он напоминает экзоскелет. Энцелограф (прибор, регистрирующий мозговую биоэлектрическую активность) считывает сигналы о движении, поступающие от пациента. Потом система фильтрует, усиливает эти сигналы и через интерфейс «мозг – компьютер» подает на приводы экзоскелета. В результате пациент видит движение своей руки в ответ на команду мозга, что способствует восстановлению нейронных связей. Волновые редукторы Han’s Motion отлично подходят для реабилитационных роботизированных комплексов, так как практически не имеют люфта, а также обеспечивают высочайшую точность и плавность перемещения. В России ведутся разработки таких систем, и во многих центрах уже используются реабилитационные роботизированные комплексы отечественного производства.
Рис. 6. Пример медицинского роботизированного комплекса для реабилитации
Конечно, сервоприводы применяются в медицине не только как часть роботизированных систем, но и в другом оборудовании, где необходимо обеспечить передвижение. Например, в компьютерных томографах с помощью сервоприводов вращаются рентгеновские трубки. Для того чтобы сократить время, которое занимает компьютерная томография, производители томографов работают над тем, чтобы увеличить скорость вращения трубок. Это сделать не очень просто: чем выше скорость вращения, тем сложней добиться точного позиционирования рентгеновских трубок, ведь они должны двигаться с постоянной скоростью для захвата изображения через одинаковые, точно установленные интервалы (рис. 7). Компания Han’s Motor может изготовить индивидуально двигатель с внутренним диаметром 1200 мм, с высокими значениями номинального и максимального момента и скоростью вращения до 35 об/мин.
Рис. 7. Устройство компьютерного томографа
Другой пример применения сервоприводов в медицинском оборудовании – столы, на которых размещаются пациенты для проведения МРТ и рентген-исследований. Эти столы оснащены линейными двигателями, которые позволяют точно настраивать высоту. Для некоторых видов обследования применяются столы, способные совершать движения в разных направлениях. Такие же системы применяются и в других конструкциях для размещения пациентов – в частности, в стоматологических креслах и больничных кроватях. Хотя для медицинских столов, кресел и кроватей уже не требуются датчики обратной связи, так как системой управляют в ручном режиме.
Еще одна важная разработка, которая получила распространение в последние годы, – это кресла-коляски с электроприводами. Они позволяют серьезно улучшить социальную адаптацию лиц с ограниченными возможностями. В США, например, делают полноприводные кресла-коляски, которые дают возможность маломобильным гражданам передвигаться и путешествовать наравне со всеми (рис. 8).
Рис. 8. Полноприводное кресло-коляска
Для каждого колеса такой коляски используется свой сервопривод, а это позволяет получить хорошую маневренность даже в помещениях и дополнительную устойчивость. Здесь тоже используется ручное управление, то есть датчики не требуются. Однако, как и в экзоскелетах, приводы должны быть максимально компактными и высокомоментными. В России тоже занимаются такими разработками.
И, конечно, важнейшую роль сегодня играет роботизированная хирургия, которая быстро развивается в последние годы. Сервоприводы, работающие совместно с компьютерами, обеспечивают точное позиционирование рабочих органов такого робота, благодаря чему возрастает точность и безопасность хирургического вмешательства.
В статье мы показали только одно направление, в котором используются сервоприводы, из чего можно сделать вывод о большом распространении и востребованности сервоприводной техники в современном мире. Также в статье мы упомянули целый ряд зарубежных производителей электродвигателей, редукторов и энкодеров, необходимых для сборки сервоприводов: это компании Assun Motor, Han’s Motor, Han’s Motion и Fenac Technology. Их продукцию продвигает на российском рынке компания «ИНЕЛСО», официальный дистрибьютор всех указанных фирм.
Особенно приятно отметить, что весной 2023 года компания «ИНЕЛСО» объявила о запуске собственной линейки сервоприводов бренда «Ферзь» для применения в разных отраслях, в частности, в тех системах, которые были описаны в статье. В линейку «Ферзь» входят исполнения сервоприводов с полым и сплошным валом, с различными двигателями и редукторами, с разными видами датчиков на валу двигателя и редуктора. В качестве опции предлагаются модели с тормозной муфтой. Широкий выбор компонентов для производства сервоприводов обеспечивает огромную вариативность: в настоящее время существует более 80 тыс. стандартных комбинаций, но при необходимости возможна доработка привода по ТЗ заказчика.
Статья опубликована в журнале «ИСУП»
Статья на сайте журнала >>