Попалась мне на глаза замечательная статья Стюарта Слэйда, сокращённый перевод которой с моими добавлениями предлагаю ниже.
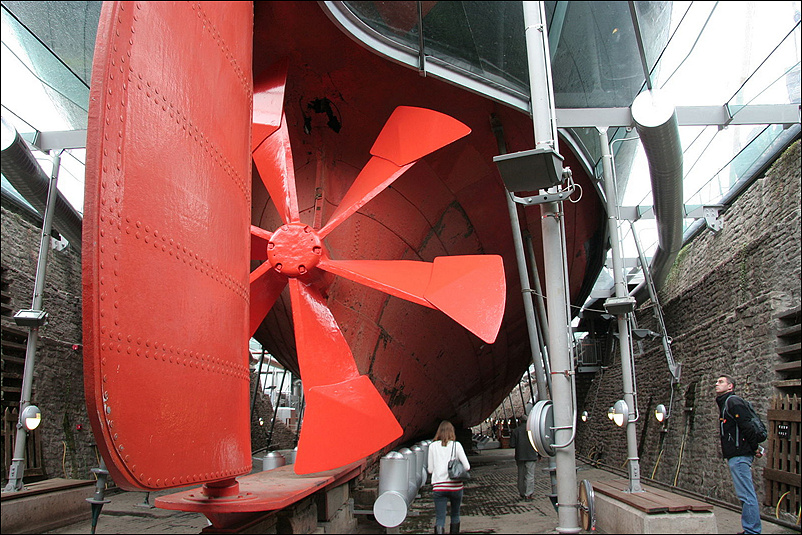
Начну с того, что в старые-то времена над всеми этими тонкостями не сильно заморачивались, вот склепают такую штуку, и фул эхед! Это винт английского «SS Great Britain», построенного в 1845 год:
Но настоящие британские учёные не сидели сложа руки и в начале второй половины XIX века взялись за корабельные винты вплотную.
Основная теория работы корабельного винта была составлена Ренкином, Гринхиллом и Р. Э. Фрудом между 1865 и 1889 годами.
Обычно считается, что винт отталкивает воду, чтобы двигать судно вперед. На самом деле, это не совсем так. Гребной винт придаёт ускорение массе воды. Согласно закону Ньютона о действии и противодействии, действие по увеличению скорости массы воды в заданном направлении создает равную и противоположную реакцию в узле винт/вал. Это описывается как тяга винта, и именно эта тяга движет судно вперед.
Как обычно, сперва была создана некая математическая модель.
Она представляла собой идеализированный винт, называемый приводом диска Ренкина, который придает внезапное равномерное ускорение всей проходящей через него жидкости, причем поток не имеет трения, вода присутствует в неограниченных количествах, а диск Ренкина работает со 100-процентной эффективностью. В этой идеализированной системе энергия, сообщаемая воде приводом диска Ренкина, равна
Е = 0,5 х М х ( V 1 - V 0 )² где:
E — энергия, необходимая для ускорения,
M — масса ускоренной воды.
V 1 — конечная скорость воды
V 0 — начальная скорость воды
Если приглядеться, это не что иное, как уравнение кинетической энергии в несколько ином виде :)
Каждый оборот винта ускоряет некий объём воды (назовём его пакет) от V 0 до V 1 . Увеличение скорости вращения увеличивает количество этих пакетов, которые проходят через диск Ренкина, но не увеличивает скорость, с которой они покидают диск.
Это важно; неважно, как быстро вращается винт или насколько он большой, именно сама конструкция винта и только она определяет ускорение воды. Хорошим сравнением является дорога с ограничением скорости, скажем 100 км/час - улучшение качества дороги или ее расширение для включения большего количества полос увеличит объем трафика, который может пропустить дорога, но скорость движения останется прежней.
В математических терминах вода, проходящая через диск Ренкина, представляет собой цилиндр, диаметр которого равен диаметру диска, а длина (количество пакетов, проходящих через диск) определяется скоростью вращения диска. С энергетической точки зрения не имеет большого значения, является ли цилиндр длинным и тонким (маленький винт, работающий на высокой скорости) или коротким и толстым (большой винт, работающий на низкой скорости). Пока два цилиндра содержат одинаковый объем воды, ускоряемой одинаково, они будут требовать одинакового количества энергии и давать одинаковый уровень тяги. (Помните, что эти цилиндры являются математическими конструкциями, а не физической реальностью).
А на самом деле, цилиндр вовсе не цилиндр, а нечто наподобие песочных часов, в самом тонком месте которых и располагается винт. Тут уже вступают в дело законы Бернулли.
Другая проблема — вынужденное вращение. В приводе Ренкина к потоку воды не применяется осевое вращение. В действительности, при малых объемах пропускания это почти верно, но по мере увеличения объемов и достижения критических значений отношения диаметра винта к скорости вращения, вода, выходящая из винта, всё более закручивается по спирали. Да вот сами посмотрите, что происходит в опытовом бассейне, пузырьки кавитации показывают истинное движение воды:

Это просто ужасно — каждая капля энергии, которая идет на вращение воды вместо ее ускорения, тратится впустую (по сути, она укорачивает наш математически сконструированный цилиндр). В математических терминах шаг спирали укорачивается по мере увеличения скорости вращения винта, а потеря энергии пропорциональна квадрату этого шага.
Увеличение размера винта и скорости вращения хороши тем, что увеличивают объем воды, которую винт ускоряет. Однако у обоих значений есть ограничения. Размер винта имеет физические ограничения (мы ведь не хотим, чтобы кончики лопастей ударялись об обшивку корпуса), ограничения по материалу (разрушение винта из-за усталости металла обычно выглядит довольно удручающе), а также гидродинамические ограничения, к которым мы вернемся ниже. Если скорость вращения слишком высока, винт начинает сталкиваться с проблемой осевого вращения, описанной выше, а также начинает кавитировать. Это верхний предел — снижение эффективности винта из-за кавитации быстро становится настолько большим, что добавление дополнительной мощности фактически замедлит судно.
Неэффективность маленького, быстро вращающегося винта убийственна. Например, если бы эффективность винта была действительно такой же, как у привода диска Ренкина, то уменьшение диаметра винта вдвое можно было бы компенсировать увеличением скорости винта в четыре раза — содержание энергии было бы тем же самым. В действительности эффективность такого винта составила бы всего 61,8 процента от полноразмерной версии с низкой скоростью — она обеспечивала бы менее 2/3 тяги. Таким образом, математически уравнения привода диска Ренкина в конечном итоге показывают нам, что большой, медленно вращающийся винт — это лучше, чем маленький, быстро вращающийся.
Мы не можем сделать многого с плотностью воды (на самом деле можем. Влияние давления глубины довольно важно — винт, работающий на глубине 15 метров, даст заметно больше тяги, чем тот же винт на глубине 5 метров из-за давления воды.
Далее, - то, что обычно называют кильватерной струей, таковой не является; это комбинация реальной кильватерной струи корабля и струи от винтов. Различить их легко - струя от винта движется назад относительно корабля, кильватерная струя корпуса движется в том же направлении, что и корабль, но с меньшей скоростью. Она возникает из-за (a) сопротивления трения корпуса, которое создает попутный поток, максимизирующийся вокруг кормы; (b) обтекающего потока корпуса, вызывающего повышенное давление там, где линии корпуса смыкаются.
Три фактора, которые создают след, дают гидродинамическую картину непревзойденной сложности. В 1965 году Ван Манен сделал ряд выводов, основанных на его экстраполяции работы Ньютона и Хэдлера. Они заключались в том, что структура следа в значительной степени является продуктом кормовой части корпуса судна; что гармонические амплитуды (поперечная вибрация) по своей природе более серьезны на судах с винтами в диаметральной плоскости; чем тоньше корма, тем эффективнее винты; что геометрия лопастей оказывает значительное влияние на вызванную вибрацию вала: что транцевые кормы менее подвержены кавитации; что руль оказывает незначительное влияние на след и что незначительные изменения скорости, водоизмещения, формы корпуса и дифферента оказывают существенное и совершенно непредсказуемое влияние на структуру следа и, следовательно, на работу винта.
Вся эта территория до сих пор остается во многом загадкой, хотя теория хаоса может дать некоторые подсказки относительно того, что там происходит.
Я думаю, хватит теории и те немногие, кто дочитал до этого места, хотели бы знать, как нам спроектировать винт, чтобы преобразовать больше мощности в тягу и, таким образом, сделать возможными более крупные линкоры?
Это включает в себя масштабные испытания в бассейнах форм корпуса для определения характеристик следа при самых разных скоростях судна, а затем включение этих данных в компьютерную модель для определения того, как винт будет вести себя в этих условиях. Геометрия каждой лопасти затем может быть спроектирована (и перепроектирована и перепроектирована и... ну вы поняли ), чтобы попытаться уменьшить взаимодействие следа/винта и выровнять этот эффект по всей лопасти. Это включает в себя медленные, терпеливые изменения конфигурации передней и задней кромки и поперечного сечения лопасти в различных точках по длине лопасти (т. е. от корня до кончика).
Площадь лопасти должна быть максимально увеличена для устранения кавитации, а количество лопастей должно быть выбрано для получения оптимальных результатов (обычно это означает как можно больше, соответствующих поддержанию плавности условий потока).
Типичным выбором в наши дни являются четырех-, пяти- и семилопастные винты, а также начинают появляться девятилопастные. По какой-то непостижимой причине шестилопастные винты более склонны к проявлению неблагоприятных характеристик, чем другие конфигурации, поэтому их обычно избегают (это не абсолют). В наши дни большую часть этой работы можно выполнить с помощью компьютерного моделирования, а результаты будут подтверждены испытаниями в резервуаре. Современные индивидуальные пропеллеры имеют чрезвычайно сложную форму лопастей, включая высокие уровни перекоса и наклона, а также экстремальные изменения радиального шага и радикальные различия в поперечном сечении на каждом этапе вдоль оси от кончика до лопасти. Вон они какие стали:
И на протяжении всего процесса проектирования люди должны помнить об одном: можно ли изготовить этот винт? Нет смысла проектировать идеальный винт, если его невозможно сделать!
...Хотелось бы добавить, что вот с этим делом у нас были бааальшие проблемы, и частично решить их удалось, только добыв хитрыми методами с помощью Кэй-джи-би специальные станки в Японии, о чём я писал здесь:
Как американец и японец помогли снизить шумность советских подводных лодок
199 000 человек прочитали, присоединяйтесь и вы :)
.......................................................................................................................................................................
Полное оглавление журнала:
Журнал о моряках и флоте с 80 000 подписчиков. Оглавление, часть 1
Журнал о моряках и флоте с 80 000 подписчиков. Оглавление, часть 2
Журнал о моряках и флоте с 80 000 подписчиков. Оглавление, часть 3