БДТ-3М – это электронный блок динамического торможения пилы деревообрабатывающего станка. Задачей блока является обеспечить полную остановку вращения пилы за время не более 6 секунд с момента выключения станка.
С готового образца изделия снята его электрическая принципиальная схема, представлена на рисунке.
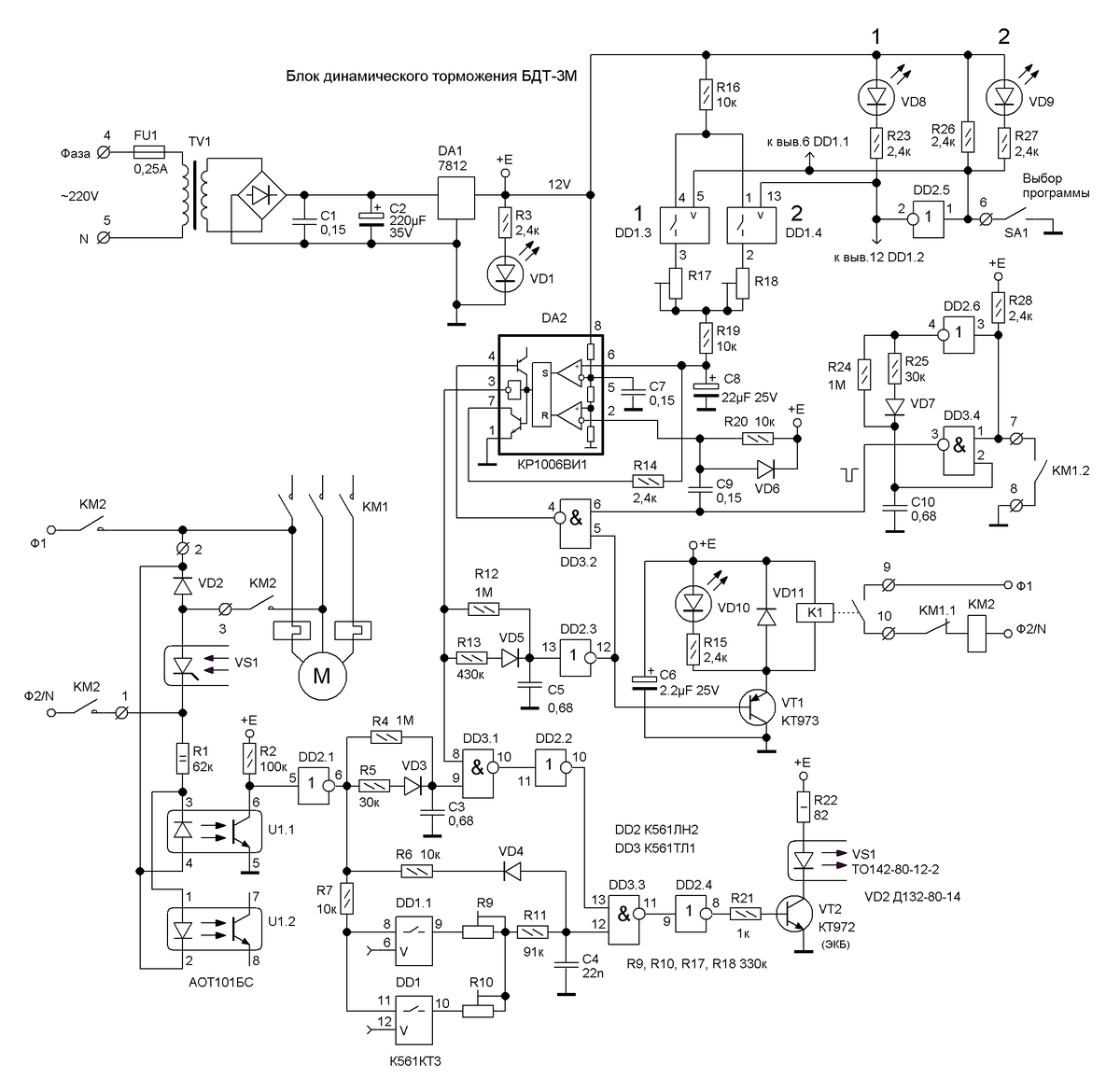
На основе анализа электрической принципиальной схемы составлено описание принципа работы блока БДТ-3М. В результате этой работы схема прошла логическую проверку и нарисована в читаемом для понимания принципа работы виде, что исключает ошибки. Т.е. в том виде, как нарисована схема, она однозначно рабочая, каких-то неясностей по поводу её работы не возникает.
Пускатель электродвигателя пилы КМ1 одновременно с пуском двигателя своими слаботочными контактами КМ1.2 замыкает на общий провод вход 1 ИМС DD3.4, чем подготавливает блок БДТ-3М к работе. А именно на элементах DD2.6 и DD3.4 собран узел формирующий на своём выходе короткий импульс запуска отрицательной полярности в момент времени, когда разомкнётся контакт КМ1.2 – когда пускатель КМ1 разомкнётся, обесточит двигатель.
С выхода DD3.4 (выв.3) импульс запуска отрицательной полярности через С9 запускает одновибратор собранный на ИМС DА2. Одновибратор на время своей работы включает 2 исполнительных выхода изделия БДТ-3М: релейный и тиристорный. Оба выхода включаются с задержкой для того, чтобы разрядилась обмотка двигателя перед началом работы динамического торможения во избежание бросков напряжения, перегрузок по току. Задержку включения реле К1 обеспечивает RC-цепочка R13, C5; задержку включения оптотиристора VS1 – RC-цепочка R5, C3. Столь существенная разница в номиналах между R5 и R13 при равных С3 и С5 объясняется тем, что С3 заряжается не постоянным напряжением, как С5, а пульсирующим с синхронизатора сетевого напряжения, а именно заряжается только в 1 полупериод сетевого напряжения. К тому же, если задействован релейный выход, как показано на схеме (не используется реле времени станка), то до начала процесса динамического торможения задержки на R13, C5 и R5, C3 суммируются — задержка на R5, C3 начнёт отрабатываться после того, как включится релейный выход и включит пускатель КМ2.
Принцип динамического торможения заключается в подаче постоянного напряжения около 36 Вольт на одну из обмоток двигателя. В блоке БДТ-3М напряжение торможения формируется тиристором, работающим в один полупериод сетевого напряжения.
Элементы DD3.1, DD3.3 являются элементами разрешения прохождения соответствующих сигналов на включение оптотиристора. На вход 12 DD3.3 подаётся сигнал регулятора мощности. Регулировка мощности динамического торможения работает следующим образом. На R1, R2, U1, DD2.1 собран синхронизатор переменного сетевого напряжения. В момент перехода сетевого напряжения через ноль ток через оптрон не течёт, R2 задаёт на входе DD2.1 (выв.5) логическую <1>, на выходе DD2.1 (выв.6) <0>. Логический ноль на выходе синхронизатора сетевого напряжения (выв.6 DD2.1) присутствует вблизи перехода сетевого напряжения через ноль и одну целую полуволну сетевого напряжения (выход оптопары U1.2 не используется), этого времени более чем достаточно, чтобы С4 успел полностью разрядиться через R6. Как только в нужный для работы оптотиристора полупериод переход через ноль сетевого напряжения заканчивается, на выходе DD2.1 (выв.6) устанавливается <1> – начинается времязадающий заряд С4. Чем быстрее зарядится С4 до порога переключения DD3.3 (выв.12), тем раньше в течение полупериода сетевого напряжения включится выходной оптотиристор – больше мощности будет отдано в нагрузку, ток торможения будет больше, двигатель остановится быстрее. И соответственно наоборот, чем дольше будет заряжаться С4, тем на менее продолжительное время будет включён оптотиристор до конца полупериода сетевого напряжения, тем меньше тока будет отдано в нагрузку. Регулировка времени заряда С4 производится резисторами R9 или R10.
Предусмотрены 2 программы регулирования, переключаются тумблером SA1. А именно, ИМС DD1 коммутирует 2 пары подстроечных резисторов, либо одну либо другую пару. Один резистор (R9 или R10) задаёт мощность торможения, второй резистор (R17 или R18) задаёт продолжительность торможения – время работы одновибратора на DА2. Светодиоды VD8, VD9 обеспечивают индикацию активности выбранной одной из двух программ регулирования.
Элемент DD3.2 обеспечивает контроль достаточной длительности импульса запуска – в дополнение к RC-цепочке R25, C10 обеспечивает дополнительное устранение дребезга контактов КМ1.2. А именно импульс запуска динамического торможения, формируемый с выхода DD3.4 (выв.3), должен быть длиннее задержки включения торможения, задаваемой RC-цепочкой R13, C5 (задержка включения релейного выхода, реле К1). Если импульс запуска досрочно прервался, включения динамического торможения не произойдёт: выход таймера DA2 будет заблокирован по входу блокировки (выв.4), при этом открытый транзистор по выходу 7 ИМС таймера через R14 разрядит времязадающий конденсатор C8 – отработка выдержки времени торможения таймером прекратится. Длительность импульса запуска формируется RC-цепочкой R24, C10, времязадающий разряд С10 через R24. Если C10 через R25 зарядился неполностью из-за ложного быстрого после замыкания вновь размыкания КМ1.2 – из-за дребезга КМ1.2, то длительность импульса запуска будет недостаточной, чтобы должным образом отработал элемент DD3.2.
Илья Янушкевич
FT9151@gmail.com
Минск, Белоруссия