Сборка наряду с паллетированием и загрузкой станков ЧПУ является одним из наиболее востребованных направлений в автоматизации производства. Всё потому, что этот процесс требует высокой точности, добиться которой от человека, утомлённого монотонным выполнением одной и той же операции, практически невозможно.
В результате любая ошибка сборщика на конвейере приводит к дополнительным расходам, связанным с порчей материалов, браком, претензиями клиентов. Роботизация сборочного производства в качестве решения данной проблемы напрашивается сама собой.
Обратим внимание, что первые коллаборативные роботы были созданы для того, чтобы освободить работников от выполнения однообразных операций именно в процессе сборки автомобилей. Это привело не только к снижению возможности брака, но и к повышению производительности и качества выпускаемой продукции. Кроме того, применение коботов значительно сокращало время простоя, обеспечивая быстрый возврат инвестиций.
Автоматизация процесса сборки необходима как на крупных производственных линиях, так и на мелкосерийных производствах. Только в первом случае для этой цели обычно используют тяжеловесных промышленных роботов – они обладают большой грузоподъемностью и скоростью работы. Однако такие машины довольно сложно и затратно перепрограммировать обычному работнику предприятия, поэтому их подключают для выполнения одной узкоспециализированной задачи, чтобы не вызывать на переналадку системного интегратора.
Для небольшого производства такой вариант неприемлем. Во-первых, промышленных роботы (не коллаборативное решение) занимают много места, а для организации безопасной зоны почти всегда нужно дополнительно приобретать защитные ограждения.
Во-вторых, узкая специализация робота подходит только для выполнения крупного заказа. А как насчёт выпуска небольших партий изделий?
Для мелкого и среднего бизнеса идеальным помощником для автоматизации производства стал коллаборативный робот. Его можно быстро переключить с одного участка производственной линии на другой, получив возможность автоматизировать любой ручной труд.
Коллаборативный робот-манипулятор без труда соберёт как крупные изделия, так и миниатюрные, вплоть до микроэлектроники, гарантируя высокое качество сборки.
В чём преимущества коллаборативного робота-сборщика Techman Robot?
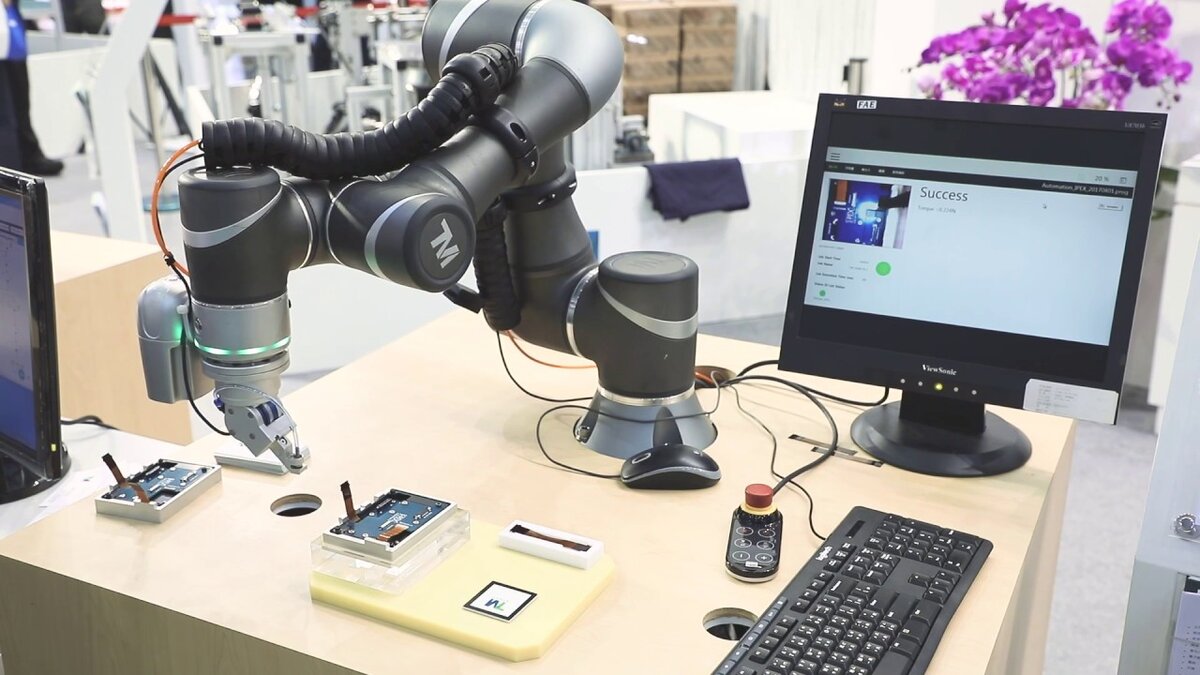
1. Эксклюзивная технология ТМ Landmark использует встроенное машинное зрение для точного размещения и сборки компонентов.
Это запатентованные наклейки Landmark. Робот определяет координаты Landmark в пространстве, а относительно неё выстраивается программа работы. Таким образом, если робот вдруг определит смещение координат Landmark, например, при сдвиге, то он также поймёт смещение всех остальных точек программы.
Таким образом, коллаборативному роботу достаточно взглянуть на Landmark, и он автоматически определяет произошедшие смещения, если таковые были, и запускает программу без дополнительных настроек. Эта функция также даёт возможность легко применять робота в мобильных задачах, где робот перемещается от одного участка к другому.
2. Применение датчиков контроля силы и момента TM Robot, а также автоматизация усилий по завинчиванию позволяют собирать даже очень сложные и технологичные детали и компоненты.
3. Возможность компенсации позиции смещения объекта за счёт внешней камеры – функция «Upward Looking». Робот создаёт точку TCP по изображению объекта. Применяется на тот случай, если захватываемая деталь может иметь смещение в захвате робота. Таким образом, функция позволяет более точно производить операцию сборки.
4. Встроенная камера робота, позволяющая определять координаты объекта.
5. Возможность подключения дополнительных камер Basler из ряда TM Plug&Play, которые очень просты в интеграции с роботами Techman и бюджетны в стоимости.
6. Использование коллаборативного робота Techman позволяет сократить время сборки, повысив производительность и качество выпускаемой продукции.
7. Возможность настройки коллаборативных манипуляторов TM Robot в режиме работы с пониженной скоростью, когда человек входит в зону работы робота, и восстановления максимальной скорости, когда человек покидает эту зону. Однако, в любом случае, за счет силомоментных датчиков, контролирующих усилия кобота, если сборочный робот коснется человека, он моментально остановится.
8. Интуитивно понятное программное обеспечение позволяет любому работнику настроить коллаборативного робота Techman, просто перемещая манипулятор в требуемое положение. Управлять роботом Techman так же просто, как пользоваться телефоном.