Все подборки
Лаборатория проектов 169
321
подписчик
Интересные проекты, авторские разработки и другие полезности. Автор много лет работает в школе, преподавая физику, информатику, робототехнику, технологии ИИ. Часть находок публикуется в книгах, но есть и то, чем проще делиться в рамках канала "Лаборатория".









Как сделать ролик от Алиса AI длиннее? Скриншот + видеоредактор.
Добрый день. Ранее мы уже начали выкладывать ролики с "оживлением" пластилиновых персонажей. Это на самом деле интересная тема, особенно в варианте совместного творчества с детьми. Она объединяет ручную совместную работу с персонажами и ее видео воплощение с помощью ИИ, в нашем случае используется Алиса AI. О педагогическом аспекте данной технологии поговорим в отдельном материале, а сейчас ответ на вопрос - а как создать более длинный "мультик"))) Итак, у нас есть 4 секунды от Алисы AI. Далее мы...
Varwin #7. Проект "Логика". Объекты-"прямая логика и инверсия".
Лампа выключена, значение А равно 0. При нажатии на кнопку лампочка загорается, при этом А получает значение 1. При не нажатой кнопке лампочка горит, при нажатии на кнопку лампочка выключается. Логическая часть. Программа написана на языке Blockly, адаптированном для Varwin. Для входа в редактор в меню сцены необходимо нажать...
Varwin #7. Проект "Логика". Работа с объектами. Работаем с объектами.
В редактор встроено некоторое количество стандартных бесплатных объектов со встроенной логикой. Сочетая их, можно добиться неплохой функциональности проекта. Для сцены в нашем проекте выбраны стандартные и импортированные объекты - изображения. Имена изменены для упрощения работы в визуальном редакторе. В данном разделе находятся импортированные через Библиотеку объекты.
В нашем случае, для наглядности используются изображения из презентации "Логические основы компьютеров" (автор К.Ю.Поляков, ссылка на страницу - http://kpolyakov...
Varwin #6. VR – проект на основе стандартных объектов: "Логика"
Мы начинаем небольшой цикл, посвященный проекту, построенному на базе только стандартных объектов библиотек бесплатной учебной версии Starter. В таком варианте их вполне можно использовать в рамках предмета Информатика. С одной стороны - вполне себе учебный проект для учащихся, с повторением важной темы, с другой - освоение среды VR-разработки. Проект был разработан Д.А.Пикаловым, коллегой по "Лаборатории проектов 169" и реализован в рамках учебных проектов учеников по предмету Информатика. Да, сразу: не стали менять скриншоты на новую версию среды...
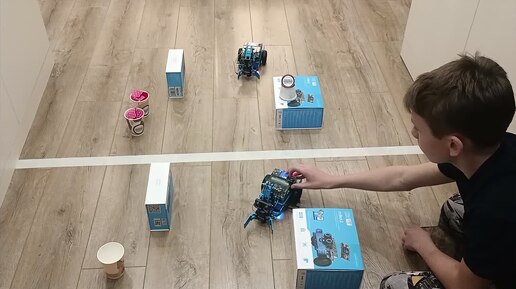
mBot2 #37. Делаем FPV-робота простыми средствами.
Добрый день. Сразу оговорюсь - материалы статьи подходят для любой игрушки с пультом дистанционного управления, например Lego машинка на ИК-пульте. Просто ранее мы уже показывали различные варианты дистанционного управления для mBot2, вот на его примере все и покажем. Мы рассмотрели вариант с фирменным пультом от MakeBlock и вариант управления роботом с другого робота, используя внутренний Wifi. В последнем варианте в качестве пульта можно использовать и не робота, а другой вариант комплекта на основе Pocket Shield и CyberPi (такой комплект тоже уже смотрели)...
Varwin #5. VR - доступно. Обучающий кейс от Varwin – "Волшебный мастер класс"
Очень удачный обучающий кейс от компании VarWin. Содержит дополнительные объекты и сцену, позволяющие провести весьма содержательное занятие по знакомству с иммерсивными технологиями. Публикуем, т.к. не все находят данный мастер-класс на ресурсах VarWin, а тема хорошая, можно использовать в обучении в школе. Материалы можно загрузить с раздела: https://varwin.com/ru/education/materials/
Раздел - Скачать материалы для пробного урока Потребуется заполнить простую анкету и вы получаете доступ к загрузке материалов: • Методические рекомендации по проведению пробного урока Varwin...
Varwin #4. Дополнительные кейсы и другие материалы по VarWin
Здесь мы постарались собрать максимум по материалам, на основе которых можно учиться и делать свои проекты в среде VarWin Официальная документация и обучающие материалы · Курс на Stepik: https://stepik.org/course/182495/promo · Учебно-методический комплекс для версии Starter Edition: · https://disk.yandex.ru/i/T_5o8ZsmWaFsCQ · https://disk.yandex.ru/d/ZuZLxtKtO6KeYA · Кейсы по дополненной реальности: · https://disk.yandex.ru/i/bhPxNpWb6dlDBg · https://disk.yandex.ru/i/O7o7_fMTrj-IdQ · https://disk...
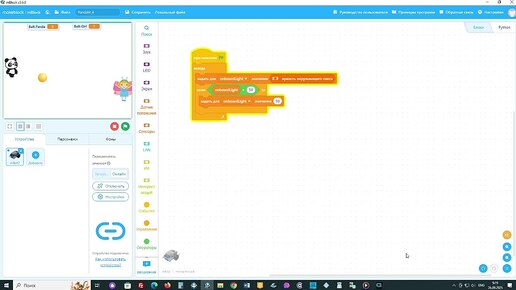
Varwin #3. Создаем первый проект. Программируем логику.
После создания основы, можно переходить к программированию поведения объектов. В визуальном редакторе логики используется среда блочного программирования на основе Blockly, схожая с популярной средой Sсratch. Запуск среды осуществляется со страницы проекта, кнопка с рисунком, напоминающим пазл. • Запустите среду программирования поведения объектов. Откроется окно редактора. Обратите внимание, сверху теперь две вкладки, относящиеся к проекту – "Сцены проекта" (здесь можно добавлять новые сцены, переходить...
Varwin #2. Создаем первый проект. Сцена. Объекты. Управление видом.
Продолжим. С встроенным проектом попробовали, вернемся к изучению интерфейса программы Varwin В разделе "Библиотеки" хранятся встроенные, купленные или загруженные самостоятельно объекты. Очень радует, что в 17 версии Varwin сцен и объектов стало заметно больше, уже есть с чем работать))). В правом верхнем углу переход к импорту файлов (трехмерные объекты, изображения, звуки, музыка, видео) и ссылка на инструкцию по их созданию/ Возможно, это вам очень понадобиться, если понравится создавать VR миры и решите продолжить углубленное изучение этой технологии...
Наше пособие с разделом по VR
Постепенно мы выкладываем новые материалы по разработке VR проектов в среде Varwin. По ходу работы приходится приводить наши материалы в соответствии с работой в 17 версии среды, а значит - проверять картинки и работоспособность старых и добавлять новые))) Но уже сейчас можно пользоваться нашим бесплатным pdf пособием - "Лаборатория креативного программирования" v3. Уже в 3 версии появился раздел, посвященный VR разработкев Varwin, а также наши базовые кейсы по проектам. Вполне можно пользоваться...
Varwin #1. Первый запуск и встроенный проект. Управляем дроном на полосе препятствий.
В прошлом материале мы рассмотрели установку среды Varwin на компьютер. Продолжим, познакомимся с внешним видом программы и попробуем поуправлять объектами в демонстрационном проекте. Запустите среду Varwin. Интерфейс приложения очень прост: после запуска откроется основное окно программы. В левой части находится панель навигации по разделам. В разделе "Проекты" хранятся созданные вами, или загруженные откуда-либо VR-проекты. Проекты состоят из сцен, их может быть несколько. В "Проектах" уже находятся...
Знакомимся с VR - разработкой. Установка Varwin.
О возможностях внедрения технологии VR в школьное образование мы начали писать в предыдущей статье. Но безусловно, технология очень интересна, многие хотели бы ее "попробовать". И вариант реально поработать с технологией есть. Пусть пока не у всех есть очки виртуальной реальности, но для демонстрации возможностей вполне подойдет стационарный компьютер, вы сможете путешествовать по созданному виртуальному пространству, производить какие-то активные действия. Поможет нам в этом программа Varwin XRMS, созданная компанией Varwin из Санкт-Петербурга...