Исследователи разработали экспериментальных крошечных беспроводных роботов, способных перемещаться по кровеносным сосудам.
Нидерландские исследователи работают над созданием крошечных устройств для разрушения тромбов в сосудах. Напечатанными на 3В-принтере устройствами можно управлять с помощью магнитного поля, перемещая внутри сосуда к месту расположения сгустка.
Корпус каждого бота представляет собой крошечный штопор размером примерно с рисовое зерно и содержит постоянный магнит размером 1 х 1 мм. Для перемещения устройства ученые используют внешний вращающийся магнит. Он заставляет намагниченное тело миллиметрового робота вращаться вдоль продольной оси, позволяя ему «плыть» внутри сосуда даже против направления кровотока.
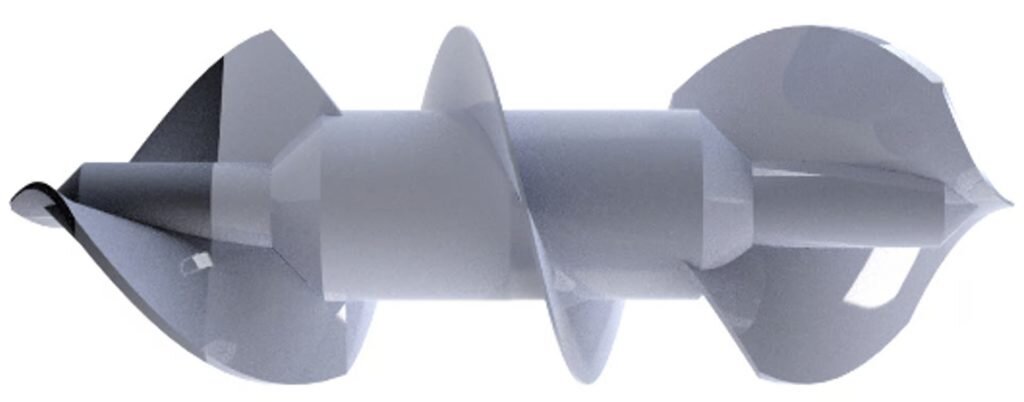
Строение крошечного робота. Фото: Universidad de Twente
Робот вводится в сосуд через канюлю — полую медицинскую трубку. Под действием внешнего управления он двигается в сторону сгустка и разбивает его. После разрушения тромба, исследователи изменяют направление вращения внешнего магнита, заставляя робота плыть обратно к канюле. После этого устройство можно безопасно извлечь из сосуда.
Управление магнитным роботом внутри сосудов
В лабораторных экспериментах вращающийся магнит на роботизированной руке использовался для направления нескольких милроботов – как вверх, так и вниз – через кровеносные сосуды, соединяющие извлеченную аорту и почки свиньи. Максимальный поток крови составлял всего 120 мл в минуту, но ученые полагают, что с мощным магнитом роботы преодолеют и больший поток.
Читать далее:
10 триллионов кадров в секунду: посмотрите, как ютуберы засняли скорость света
НАСА показало на тысячелетнее движение льда на Марсе
Посмотрите на 4-километровую вулканическую трещину, извергающуюся в Исландии
На обложке: тестирование робота в извлеченных аорте и почках свиньи. Фото: Universidad de Twente