Как уничтожить, или отклонить астероид/комету — мы разберемся позднее. Но прежде чем что-то делать, хотелось бы как-то изучить этот космический объект. И сделать это необходимо очень быстро, так как каждый день и даже час расстояние между Землей и опасным объектом сокращается, а значит, снижается вероятность успеха защитной миссии.
В 2000-х, когда считалось, что астероид Апофис столкнётся с Землёй, и в российском НПО имени Лавочкина создали проект для отправки к нему специального аппарата, чтобы уточнить его траекторию. Дело в том, что именно наблюдения, сделанные в непосредственной близости от объекта, являются самыми точными. Пока аппарат разрабатывался, уже математически было установлено, что Апофис не должен столкнуться с Землёй, и проект свернули. А зря.
И как это сделать, — описано в данной статье.
Метод швартовки космических зондов
к малым небесным телам
Автор: Сергей Малицкий. Журнал "Авиация и Космонавтика", №11, 2023 г.
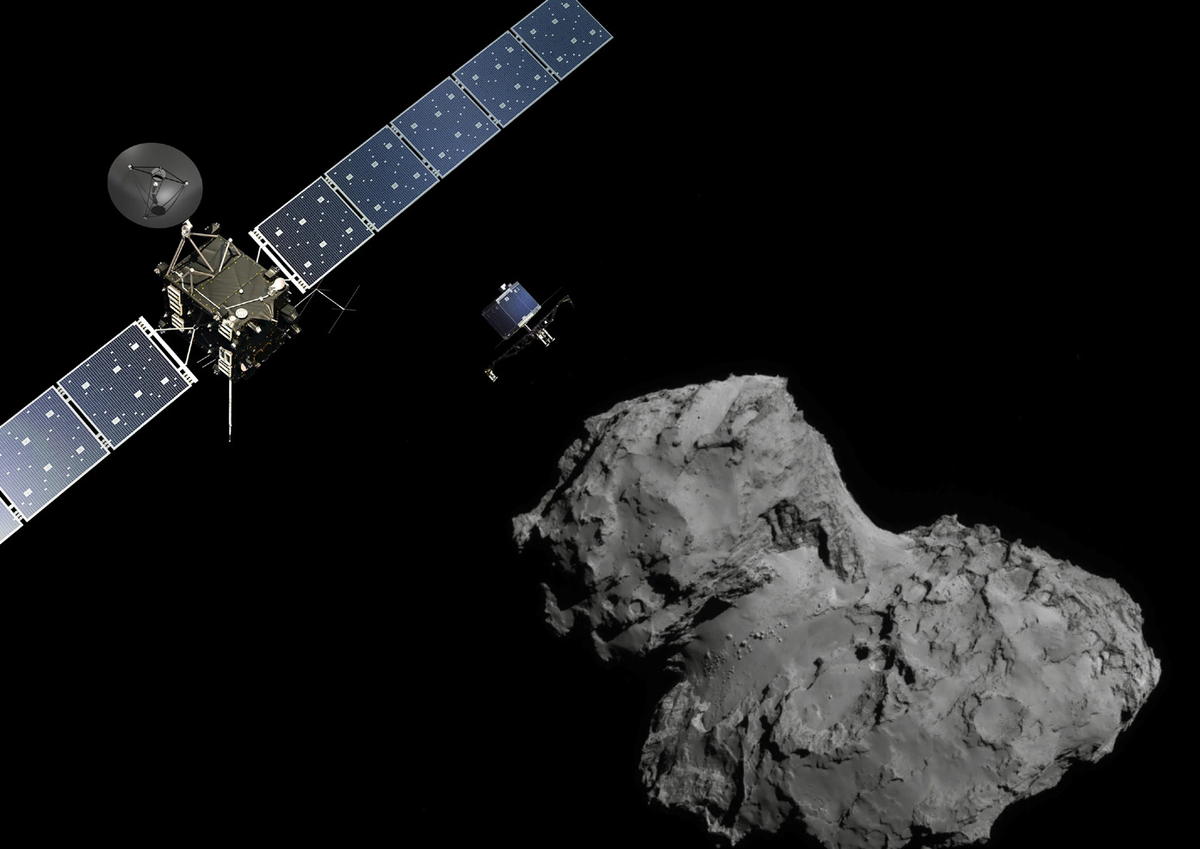
Сегодня, когда внимание многих приковано к событиям, связанным с посадками научно‑исследовательских космических станций на поверхность Луны, не лишним будет вспомнить о событии, произошедшем почти 10 лет тому назад, когда европейская космическая межпланетная станция Rosetta доставила к весьма удаленному космическому телу – комете Чурюмова‑Герасименко (67P) – посадочный аппарат Philae, выполнивший посадку на ядро кометы, хотя и не совсем удачную.
Кратко напомним читателям о том, что тогда произошло, опираясь на информационные материалы портала «Global Science».
Разработка миссии Rosetta началась в 1970–1980‑х годах совместно NASA и
европейским космическим агентством ESA. Тогда планировалось направить космический зонд к подлетающей к земле комете Виртанена/46P, взять образцы её грунта и вернуть собранный грунт на Землю. Но вскоре NASA вышло из проекта, в результате чего бюджет программы был урезан. От идеи доставить кометное вещество на Землю отказались. Было принято решение направить к комете посадочный модуль и произвести исследования на месте.
Посадочный модуль Philae имел массу около 100 кг, а размером был с боль-
шой холодильник. Космическая станция Rosetta также имела примерно 150 кг
различного научного оборудования.
К 2002 году всё было уже готово, но из‑за аварии европейской ракеты‑носителя Arian‑5, с помощью которой Rosetta должна была отправиться к комете, миссию пришлось отложить. Но когда появилась возможность нового пуска, комета Виртанена оказалась уже недоступна. Поэтому для миссии Rosetta/Philae
была выбрана другая цель — комета Чурюмова‑Герасименко (67P).
Ракета‑носитель успешно стартовала 2 марта 2004 года с космодрома
Куру во Французской Гвиане, а в марте 2014 года космическая станция Rosetta
«прибыла к месту назначения» и начала передавать первые изображение ядра кометы. Поскольку карты поверхности ядра кометы у астрономов не было, место посадки спускаемого аппарата Philae нельзя было выбрать заранее. Поэтому более полугода специалисты выбирали такое место.
Чтобы посадить Philae на поверхность ядра кометы, нужна была ровная площадка, размером с футбольное поле. Но такого места на комете не оказалось. Поэтому специалистам пришлось выбирать один из наименее худших участков. 12 ноября 2014 г. начался спуск Philae к поверхности ядра кометы, который продолжался несколько часов.

Вскоре обнаружилось, что не работает ракетный двигатель в верхней части посадочного модуля, задачей которого являлось «прижать» Philae к поверхности ядра кометы во время посадки и не дать улететь ему в космос, когда будут выпущены специальные гарпуны для фиксации аппарата на поверхности.
Затем выяснилось, что и гарпуны не сработали. В условиях малой гравитации посадочный модуль оттолкнулся от поверхности ядра кометы и улетел в космос на километр, затем снова сблизился с поверхностью, снова отлетел и лишь с третьей попытки осуществил посадку, но, как выяснилось впоследствии, попал в углубление на поверхности ядра кометы. Это привело к нерасчётно малому облучению его солнечных батарей солнечным светом. Поэтому команда управления посадочным модулем внесла изменения в программу исследований, чтобы с минимальными затратами энергии получить максимум возможной информации и успеть передать её на Землю, пока в аккумуляторах сохранялся запас энергии. К примеру, было решено отменить бурение поверхности, поскольку эта операция была весьма энергозатратна. Примерно
через 60 часов Philae «впал в спячку»…
А вот орбитальный аппарат Rosetta продолжал летать вокруг ядра кометы, проводить собственные исследования и передавать на Землю изображения ядра кометы. Интересно отметить тот факт, что пока посадочный модуль еще работал, удалось провести «просвечивание кометы» с помощью прибора CONSER, который посылал сигнал от модуля к аппарату Rosetta через ядро кометы. Анализ результатов этого эксперимента показал, что комета весьма пористая и 75–85% её объёма составляют пустоты.
Кстати, траектория, которую описал Philae, подскакивая над поверхностью ко-
меты, и оставленные на ней следы, отснятые станцией Rosetta, позволили сделать выводы о свойствах кометной поверхности. Оказалось, что сначала Philae столкнулся с мягким зернистым грунтом толщиной около 25 см, который покрывал более твёрдую поверхность, а затем сел на плотный слой пыли и льда.
Миссия «Розетта» завершилась в 2016 году запланированным столкновением космического зонда с ядром кометы. Причем все это время на Землю передавалась фотоинформация от бортовой камеры (всего было передано около 70 тысяч снимков).
Не совсем удачные результаты проекта ЕКА «Rosetta – Philae» по исследованию поверхности кометы Чурюмова‑Герасименко заставляют задуматься о возможностях более эффективных подходов и методов для изучения малых небесных тел.
А вообще, возможно ли, находясь на Земле, на расстоянии более 1,2 а.е. (больше 180 млн. км) точно определить какова поверхность кометы или другого малого небесного тела? Какова его плотность? Какие нужны будут «гарпуны», и с какой силой надо столкнуться с поверхностью, чтобы надёжно на ней закрепиться?
Я думаю, что невозможно определить на Земле конкретный «гарпунный» способ закрепления на поверхности!
Во‑первых, мы вообще не знаем какими будут точные причальные условия на поверхности малых небесных тел. Эти небесные тела могут быть пористые и/или хрупкие, и от удара гарпуна могут расколоться. Или они могут содержать крупные фрагменты железных сплавов, и тогда гарпун упруго срикошетирует от поверхности. Или они могут содержать слой пыли, замороженных газов или льда… Возможно, каждый участок небесного тела может иметь различную поверхностную структуру.
Во‑вторых, физические условия для малого небесного тела, находящегося на высокоэллиптической солнечной орбите, и для зонда, запущенного с Земли и выполняющего орбитальное маневрирование, очевидно различны! Тогда можно предположить, что обыкновенный кулоновский заряд двух объектов может заметно различаться. И какие при их сближении могут возникнуть эффекты — можно только догадываться.
В‑третьих, невозможно исключить наличия полостей или карстовых пустот, внешне невидимых на поверхности малых небесных тел, особенно на кометах.
И тогда спускаемый аппарат просто может пробить тонкую поверхностную стенку и оказаться в замкнутом пространстве, что исключит возможность развертывания не только солнечных батарей, но и любых дистанционных приборов.
В общем, нужен универсальный способ причаливания к малым небесным телам (далее МНТ), который был бы настолько надёжен, что позволило бы гарантировать следующие результаты:
• в любом варианте (разумеется, исключая ошибки ориентации) зонд должен надёжно закрепиться на поверхности МНТ;
• многоразовые упругие «прыжки» следует исключить, т.к. при этом становится почти невозможно обеспечить попадание зонда в зону посадки;
• солнечные батареи, а возможно и часть приборов, не должны располагаться только в одном месте, а должны распределяться по поверхности МНТ, для постоянного или более надёжного электропитания бортовых систем зонда;
• идеальным был бы способ такой швартовки к МНТ, чтобы имелась возможность перемещения по поверхности.
Научный и практический интерес к данной задаче не может ограничиваться только уникальными исследованиями комет или крупных астероидов. А давайте
представим себе научную ценность постоянных фото‑сессий и отчетов приборов из разных зон колец Сатурна? А как к ним причалить? Как прикрепиться к этим орбитальным конгрегациям, не вызвав их разрушения или заметной деформации общей структуры?
А проблема астероидной и метеоритной опасности? Может быть, имеет смысл «метить» потенциально опасные МНТ маяками и датчиками, подобно тому, как биологи метят перелётных птиц или морских обитателей? Или доставлять на опасный астероид взрывное устройство для его уничтожения или отклонения от небезопасного курса. Но опять вопрос! Как эффективно и просто закрепить зонд на поверхности малого небесного тела неизвестной плотности и структуры, тем более с ничтожной гравитацией?
В данной работе я совершенно опускаю уже технически решённые вопросы, принципиальную правильность решения которых великолепно продемонстрировал проект ЕКА «Rosetta – Philae»: доставку зондов на солнечную орбиту; орбитальное маневрирование и сближение с нужным объектом; выравнивание относительных скоростей; нацеливание зонда и другие вопросы, не связанные непосредственно с проблемой причаливания к МНТ.
Предлагаемое решение проблемы – двухкомпонентный спускаемый зонд и использование принципа «болас».
Болас (bola — шар), древнейшее метательное оружие, веревка длиной 1–1,5 м с привязанными к ее концам одним или несколькими шарами (из камня, позднее из металла), традиционный атрибут южноамериканского гаучо; применяется в конной охоте на копытных животных, в животноводстве. При броске обвивает ноги или шею жертвы, лишая её подвижности.
Таким образом, основная идея надёжной швартовки зондов к малым небесным
телам заключается в следующем:
В конструкции зонда имеется как минимум два раздельных элемента. Эти элементы механически соединяются между собой при помощи гибкого и длинного троса. Подобный трос можно изготовить из углеродных волокон целлюлозного происхождения, пропитав их соответствующим составом, который, например, используется при разработке костюмов для космонавтов. Современные технологии позволяют получить высокопрочный трос с массой до 1 кг/км.
После нацеливания и отделения от корабля носителя и до приближения к МНТ элементы зонда разделяются на расстояние 3 и более поперечного диаметра МНТ. Тогда при посадке и соприкосновении с МНТ трос и разделяемые элементы зонда за счет сил инерции обвивают МНТ, перекручиваются и, тем самым, надёжно закрепляет зонд к его поверхности.
Для иллюстрации, рассмотрим вариант с двумя раздельными элементами зонда и небесное тело, похожее на ядро кометы Чурюмова‑Герасименко.
На первом этапе (фаза “a”), зонд нацеливается на точку причаливания и с малой скоростью начинает сближение с МНТ. При этом, разделяемые элементы
зонда ещё не отделены.
На втором этапе (фаза “b”), за счет микродвигателей зонда, он получает осевое вращение. Это необходимо для исключения столкновения элементов после обвития МНТ, а также использования центробежной силы для разбега элементов зонда. Кроме того, осевое вращение позволит улучшить курсовую устойчивость.
На третьем этапе (фаза “c”), происходит отделение разделяемых элементов и их разбег, при этом они не могут удалиться бесконечно, т.к. остаются в механической связи за счет троса. Расстояние между элементами должно быть гарантированно больше, чем поперечный размер МНТ.
На последнем этапе (фаза “d”), трос соприкасается с поверхностью МНТ. Однако, разделяемые элементы, двигаясь по инерции, обвивают МНТ и, тем самым, надежно закрепляют спускаемый аппарат. Можно допустить, что при соударении с поверхностью, массивные элементы могут упруго отскочить от МНТ, однако эти «прыжки» будут быстро компенсированы силой трения троса о поверхность. Можно также применить на разделяемых элементах
незначительно отдаленные остроконечные зацепы (якоря) для предотвращения соскальзывания и стягивания элементов зонда по поверхности МНТ. Таким образом, будет обеспеченна надёжная и стабильная швартовка зонда.
Несложно представить также и вариант спускаемого аппарата с тремя разделяемыми элементами. При этом, один может находиться по оси траектории сближения, а два других отделяются, имеют осевое вращение и обеспечивают обвитие троса.
Достаточно очевидны преимущества такого способа швартовки:
• будет обеспечена надёжная швартовка к МНТ, вне зависимости от поверхностной плотности, наличий пустот или других физических условий;
• появляется возможность, как полностью дублировать системы зонда, так и проводить исследования не в одной, а в нескольких точках;
• появляется возможность заметно улучшить энергетику спускаемого аппарата, т.к. вероятность нахождения в теневой зоне для двух, а тем более трех элементов — существенно ниже;
• появляется возможность провести обширное исследование поверхности МНТ, за счет использования подвижных измерительных элементов, которые могли бы перемещаться («ползти») вдоль троса;
• если обеспечить внутри троса токопроводящие элементы, то появляется возможность использовать трос как приемно‑передающую антенну и/или
выполнять передачу энергии солнечных батарей от одного элемента к другому.
Современные технологии уже позволяют создать весьма легкий и прочный трос для таких операций. Тем более, что при низких скоростях сближения с МНТ около 1–2 м/с) и незначительной массе спускаемого аппарата (например, до 100
кг) разрывная нагрузка будет вполне приемлемой.
Также технически не сложно будет выполнить практическую отладку и отработку систем механики и автоматики вблизи Земли, а не на дальности в миллионы километров, для чего следует использовать элементы космического мусора, которые, к сожалению, имеются на орбите в достаточном избытке.
* * *
Как уже отмечалось, проблема причаливания к малым небесным телам достаточно актуальна для современной космонавтики. Согласитесь, очень обидно потратить несколько миллиардов и годы работ, чтобы в остатке получить только очень красивую фотосессию и десятки часов работы аппаратуры, вместо нескольких лет уникальных постоянных исследований и измерений.
Данная работа никаким образом не может считаться законченным исследованием или проектом. Это, скорее, приглашение к дискуссии и научному поиску способов решения одной из проблем современной космонавтики. И автор будет признателен за любые отзывы и предложения, включая альтернативные идеи или конструктивную критику. Для всех, кто готов принять участие в этом, прошу писать на электронный адрес: gri‑bond@mail.ru.
Информация с портала «Global Science»