В общем случае системы автоматизации принято рассматривать как совокупность элементов, соединённых параллельно и/или последовательно и охваченных обратными связями. И любой инженер-автоматизатор должен это знать как “отче наш”.
Обратная связь в таких системах имеет важное значение. Суть обратной связи заключается в том, что выходной сигнал системы (или отдельного элемента) подается обратно на вход той же системы (элемента). Обратная связь может быть положительной и отрицательной.
Выходной сигнал обычно является более мощным, чем входной. Поэтому в большинстве случаев на вход подаётся не весь выходной сигнал, а его часть.
Обратная связь на входе нужна для понимания того, что происходит на выходе. Например, какой-то усилитель должен поддерживать на выходе строго определённое значение сигнала. Но сигнал на входе может изменяться. В этом случае обратная связь позволяет понять, в какую сторону отклоняется выходной сигнал, и принять меры для того, чтобы вернуть его в заданный диапазон значений.
Положительная обратная связь - это когда часть выходной величины прибавляется к входному сигналу. Она обычно используется для ускорения переходных процессов, но может вызвать автоколебания. Потому что увеличение сигнала на выходе приводит к увеличению сигнала на входе, что снова приводит к увеличению сигнала на выходе и так далее.
Отрицательная обратная связь - это когда часть выходной величины отнимается от входного сигнала. Отрицательная обратная связь вызывает общее уменьшение коэффициента усиления и таким образом оказывает стабилизирующее воздействие - делает систему более устойчивой. Например, при увеличении значения входного сигнала, благодаря отрицательной обратной связи, коэффициент усиления уменьшится, следовательно, уменьшится и значение выходного сигнала. И наоборот. Таким образом отрицательная обратная связь удерживает выходную величину в допустимом диапазоне значений.
Основной характеристикой обратной связи является коэффициент β, который показывает, какая часть выходной величины подаётся обратно на вход.
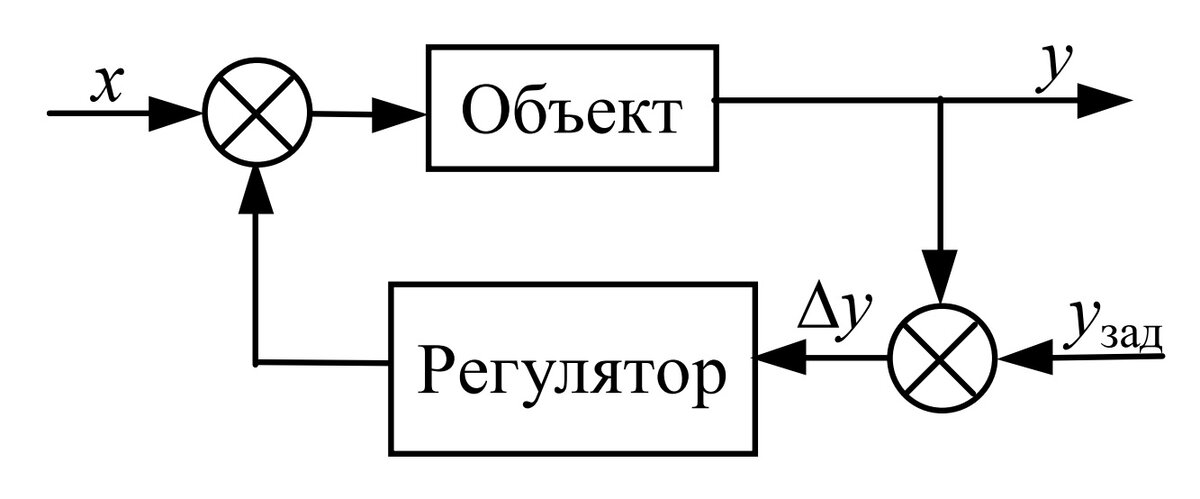
На рисунке показана структурная схема автоматического регулирования по отклонению. Схемы с обратной связью выполняют именно регулирование по отклонению. То есть когда выходное значение отклоняется от допустимого диапазона, система с помощью обратной связи возвращает это значение в нужный диапазон.
На рисунке:
- х - входная величина
- Y - выходная величина
- Yзад - заданное значение
- Δy - отклонение или ошибка управления
Δy = Y(t) - Yзад
Y(t) - это выходная величина в данный момент времени t (или, например, среднее значение за данный период).
В безупречной системе Δy должно стремиться к нулю, а t должно стремиться к бесконечности. То есть желательно, чтобы на протяжении всего времени работы системы отклонений от заданного значения не было.
Простейший пример системы с обратной связью - это изобретение И.Ползунова (создатель отечественной паровой машины) - регулятор уровня воды для паровой машины.
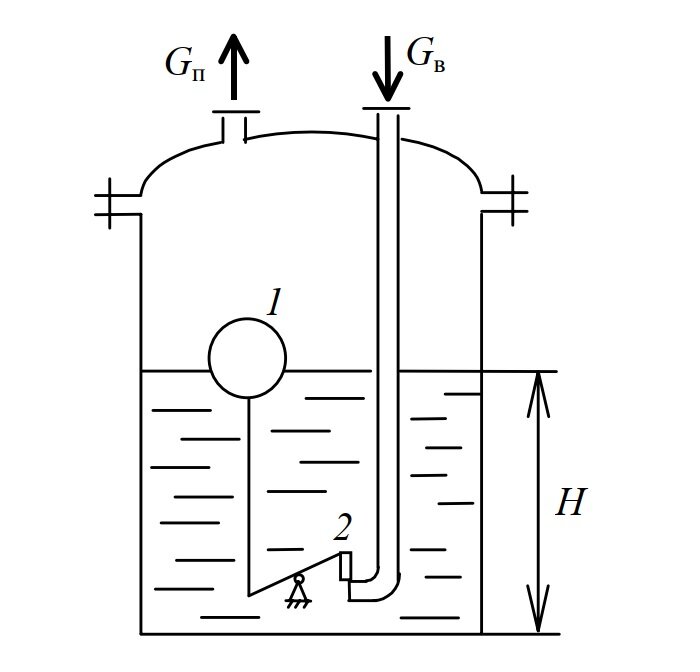
Задача простая - поддерживать заданный уровень воды Н в паровом котле. Но в те времена додуматься до этого смог только Ползунов (1765 год).
Регулятором в этой системе является поплавок 1, который связан системой рычагов с регулирующей заслонкой 2. При увеличении уровня (выходной сигнал увеличивается) поплавок поднимается вверх, заслонка опускается и начинает перекрывать подачу воды (уменьшает входной сигнал). Это и есть отрицательная обратная связь. При уменьшении уровня происходит обратный процесс. Таким образом уровень воды Н поддерживается постоянным (с некоторыми погрешностями, конечно).
Вот так вот наши далёкие предки уже умели автоматизировать процессы. А вы говорите - микроконтроллеры, ПЛК, облачные решения… Иногда проще, дешевле и надёжнее использовать дедовские способы. Особенно в условиях санкций )))
На этом всё. Подписывайтесь на канал, чтобы ничего не пропустить…