Японские инженеры разработали биогибридную руку, приводимую в движение актуаторами из пучков выращенных в лаборатории человеческих мышц. Роборука имеет в длину 18 сантиметров, способна выполнять движения индивидуально каждым из пяти пальцев, а также может передвигать небольшие предметы. В руке используется мышечный актуатор, который состоит из нескольких длинных тонких мышечных полосок, объединенных в единый пучок. Такая конструкция обеспечивает более высокую производительность по сравнению с одиночными мышечными волокнами, говорится в статье, опубликованной в журнале Science Robotics.
Одно из перспективных направлений в робототехнике связано с разработкой биогибридов — роботов, в конструкции которых используются искусственно выращенные биологические ткани. В отличие от традиционных электромеханических актуаторов, живая мышечная ткань обладает высокой гибкостью, плавностью движений и потенциально способна к самозаживлению. Однако до недавнего времени экспериментальные биороботы с приводом из настоящих мышц имели очень простую конструкцию и миниатюрные размеры.
В 2018 году группа японских инженеров под руководством Сёдзи Такэути (Shoji Takeuchi) из Токийского университета представила небольшой манипултяор, состоящий только из одного шарнира, приводимого в движение актуатором на основе мышечной ткани из клеток крыс. Манипулятор мог отклоняться почти на 90 градусов и поднимать легкие грузы. Другая их разработка — простейший миниатюрный двуногий шагоход. Он также двигался за счет сокращения мышечной ткани и развивал скорость до 5,4 миллиметров в секунду.
Теперь эта же группа инженеров создала более сложный и крупный биогибридный механизм — человекоподобную роборуку длиной 18 сантиметров с пятью пальцами, движение которых обеспечивается исключительно за счет сокращения мышечной ткани. Основной компонент устройства — новый тип мышечного актуатора, получивший названием MuMuTA (Multiple Muscle Tissue Actuator). Вместо одной крупной мышцы с большим сечением в нем применяется несколько тонких и длинных полосок, объединенных в пучок.
Мышцы для MuMuTA искусственно вырастили из миобластов (клеток-предшественников мышечных волокон) человеческой скелетной мышечной ткани. Для этого миобласты культивировали в питательной среде при температуре 37 градусов Цельсия. По мере размножения клетки формировали вытянутые мышечные волокна, после чего растущие ткани помещали в формы из полидиметилсилоксана, которые позволяют контролировать направление роста. Эксперименты с готовыми мышечными полосками разной толщины показали, что более тонкие из них обладают большей силой сокращения под действием электрических импульсов. Это связано с тем, что в тонких тканях лучше обеспечивается снабжение клеток кислородом и питательными веществами. Инженеры выяснили, что сила сокращения увеличивается и с увеличением длительности и напряжения электрических импульсов, достигая насыщения при значениях 600 миллисекундах и 1,5 вольта на миллиметр соответственно. При таких значениях сила сокращения достигает 8 миллиньютонов, а амплитуда сокращения — до 4 миллиметров.
Через два дня после начала культивирования мышечные полоски перенесли на платформу для сборки актуатора, где продолжалось их созревание. Актуатор MuMuTA формируется из нескольких расположенных в ряд мышечных полосок, концы которых закрепляют на 3D-печатных держателях. В процессе выращивания эти держатели остаются плоскими, а при окончательной сборке их скручивают в рулон, формируя законченный актуатор трубчатой формы. Такая конструкция обеспечивает высокую плотность мышечных волокон при сохранении компактных размеров.
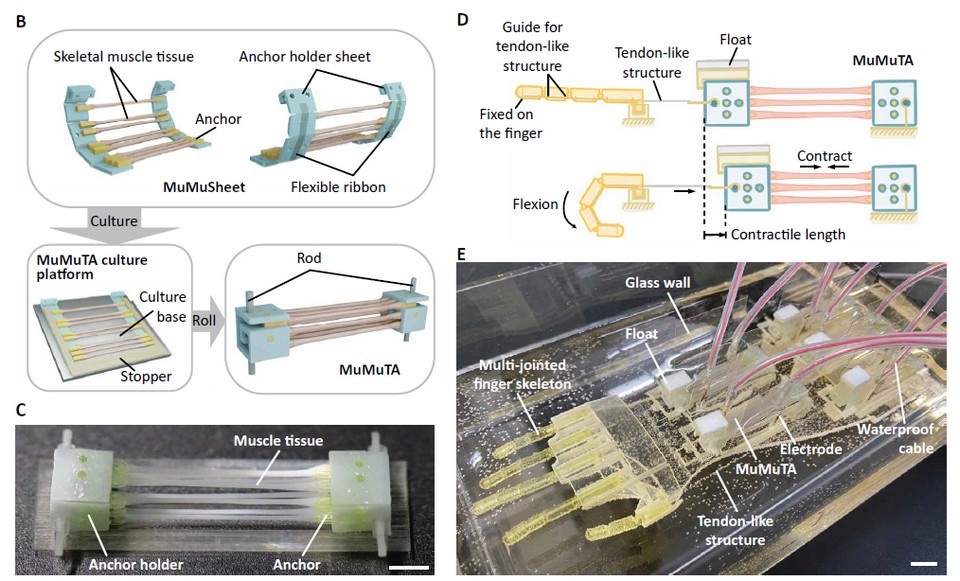
Пять актуаторов MuMuTA, состоящих из восьми мышечных полосок каждый, закрепили на каркасе, имитирующем скелет кисти и предплечья человека. На конце кисти находятся подвижные пальцы с несколькими суставами, через которые проходит система тросов, к концам которых присоединены актуаторы. При этом всю конструкцию поместили в питательную среду, которая поддерживает работу живых мышц. Когда на MuMuTA подается электрический импульс через расположенные по бокам золотые электроды, актуатор сокращается и тянет за собой сухожилие, сгибая палец. Избирательная стимуляция каждого из пяти MuMuTA позволяет независимо управлять всеми пальцами руки.
С рукой провели серию экспериментов. Инженеры подавали электрические импульсы на отдельные актуаторы, заставляя двигаться соответствующие пальцы. Максимальная скорость сгибания составила 500 градусов в секунду. Поочередное сгибание пальцев в разной последовательности позволило имитировать различные жесты. Кроме этого, инженеры продемонстрировали способность руки к простейшим манипуляциям: с помощью сжатия пальцев им удалось переместить небольшой предмет — наконечник для пипетки. В будущем авторы работы планируют улучшить конструкцию, чтобы она могла выполнять не только сгибательные, но и разгибательные движения. Для этого потребуется добавить дополнительные актуаторы, работающие как разгибатели пальцев.
Главный недостаток электростимуляции — низкая точность. Электрические импульсы активируют не только нужные волокна, но и соседние, что затрудняет избирательный контроль движений мышц. Чтобы решить эту проблему, инженеры создают трансгенную мышечную ткань, которая, например, реагирует на облучение светом с определенной длинной волны. Недавно инженеры представили биогибридного робота eBiobot, который передвигается с помощью актуаторов на основе таких оптогенетических мышц.