Благодаря изучению космоса в нашей жизни появились уникальные технологии. В частности, техника с дистанционным управлением – результат освоения космического пространства! Об этом мы сегодня и поговорим.
В 1996 г. в Исследовательском центре Гленна разработали сетевую технологию Embedded Web Technology, чтобы космонавты могли дистанционно управлять экспериментами.
Для NASA это была возможность не устанавливать программы пользовательского интерфейса на каждый прибор. В итоге Embedded Web Technology приспособили и для земной жизни: она позволяла управлять различными устройствами удалённо через Интернет.
Сегодня на МКС «живут» свои роботы, которые управляются дистанционно. И речь пойдёт про манипуляторы, ведь именно они служат для разгрузки кораблей, помощи при стыковке и проводят наружные работы.
💪🏻 Первый, и самый известный – Canadarm2, который может перемещаться по рельсам на ферменных конструкциях с помощью тележки. В основном, он служит для «подхвата» и стыковки с МКС кораблей разных стран, не имеющих активной системы стыковки.

💪🏻 На модуле «Кибо» установлен JEM-RMS, использующий те же захваты, что и Canadarm2. Эта «рука» служит для работы на японском модуле: с её помощью загружались и разгружались платформы для экспонирования образцов и грузов, прибывавших на «грузовике» HTV.
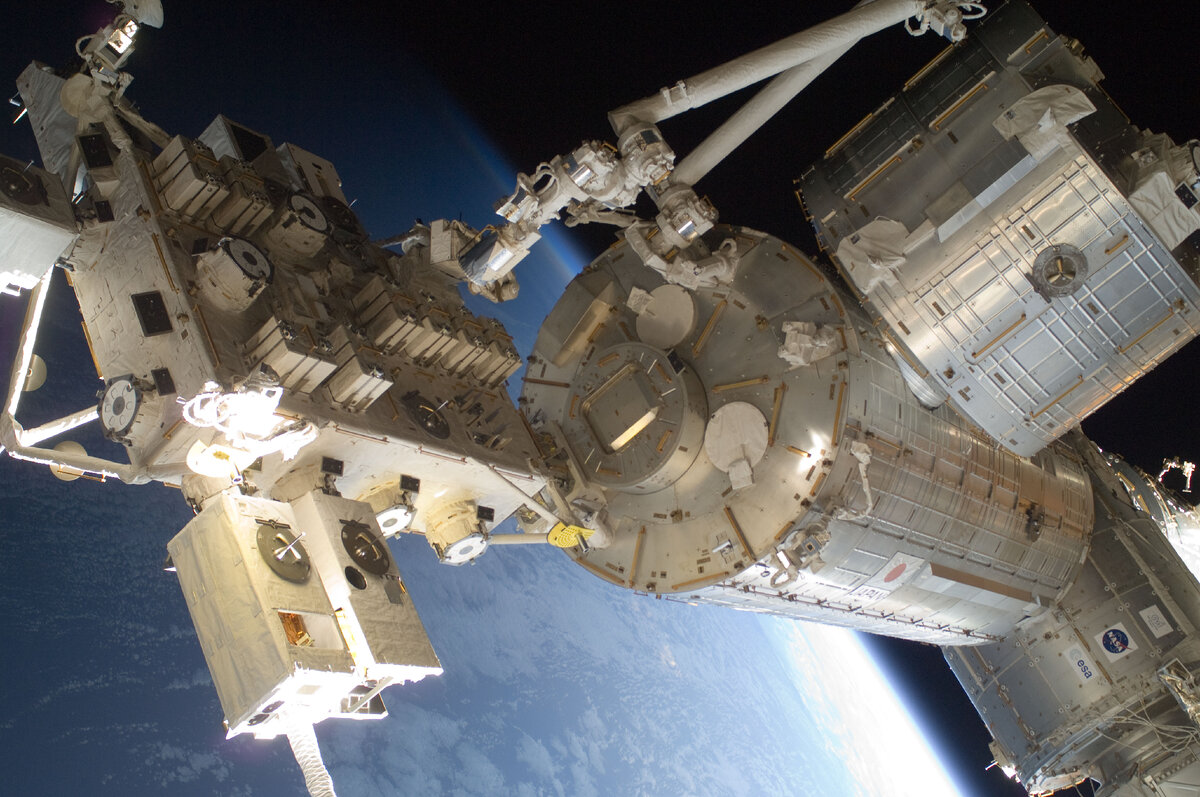
💪🏻 И вот на днях на российском сегменте заработала своя «рука». ERA вскоре станет главным механизированным помощником космонавтов: она будет устанавливать, снимать и заменять оборудование. С её помощью на модуль «Наука» установят шлюзовую камеру и теплообменник, которые уже находятся на МКС. ERA стала первым роботом, способным «гулять» по внешней стороне нашего сегмента. Таким образом она гармонично дополнила семейство роботизированных манипуляторов МКС, повысив функционал российского сегмента.
Дистанционные манипуляторы – это не только полезное дополнение к используемой на МКС робототехнике. Они позволяют расширить опыт в области робототехники в целом, что крайне важно для исследования космоса!