Доброго времени!
Я в теме строительства электротранспорта уже порядка 5 лет и набрался довольно серьезный багаж опыта и соответствующее окружение единомышленников.

Имеется у нас замечательный Telegram канал "Технари", в котором мы обмениваемся опытом, делимся интересными роликами, спрашиваем совета у сторожил на любую техническую тему и сами раздаем рекомендации новичкам на, порой, избитые вопросы.
Бывают очень неоднозначные темы, на которые просто не бывает однозначного ответа. К примеру, что лучше- Windows или Mac? IOS или Android, Мотор-колесо или центральный мотор?
Такие вопросы всегда рождают бесконечные споры между приверженцами той или иной стороны.
И всегда единственно правильным ответом на подобные вопросы является - лучше то, что тебе больше подходит!
В этой статье я и постараюсь объяснить, какие типы электромоторов бывают и какой именно Вам подходит лучше.
Как вы понимаете, название моего канала - Mid-Drive, что означает центральный мотор. И раньше я яро доказывал всем, что именно центральные моторы- это единственно верный выбор. Но я повзрослел, стал опытнее, научился принимать любые точки зрения и аргументы людей, а также меня стали окружать люди, приверженные разным взглядам и направлениям. Поэтому постараюсь быть объективным и непредвзятым!
Начнем с того, какие типы электромоторов бывают?
Речь пойдет о бесколлекторных трехфазных двигателях, используемых сейчас повсеместно на электровелосипедах, электросамокатах, гироскутерах, электрических мопедах и мотоциклах, квадроциклах, электромобилях, мультироторных системах, самолетах и иных видах транспорта, радиоуправляемых, БПЛА и различном станочном и промышленном оборудовании.
Основными деталями двигателя являются: ротор с магнитами, статор с обмотками (электромагнитами), корпус и часто присутствует система определения положения ротора относительно статора. Это могут быть датчики холла, расположенные прямо между обмотками статора или в специальных пазах, либо энкодер, либо резольвер.
Устройство определения положения ротора отсутствуют лишь на высокооборотистых электродвигателях для радиоуправляемых моделей. Обусловлено это отсутствием необходимости в обратной связи от мотора ввиду не слишком высокого сопротивлению вращения вала, на котором установлен пропеллер, или гребной винт. Да и это сильно удешевляет и упрощает производство моторов и контроллеров (в случае с RC моделями это даже не контроллеры, а регуляторы оборотов трехфазных двигателей).
На электротранспорте же отслеживание контроллером положения ротора относительно статора крайне важно, чтобы переключать фазы питания на нужные обмотки в нужный момент. Ведь нагрузка на электромотор может резко возрасти, крутящего момента может не хватить для поддержания заданных оборотов двигателя, как при движении на автомобиле в гору на 5 передаче. Двигатель начнет терять обороты и если подача большого фазного тока на обмотки двигателя произойдет не в тот момент, то возможен срыв фаз с выходом контроллера из строя. Это ответ на частый вопрос новичков - почему никто не ездит в на электробайках в "безхолловом" режиме, если многие контроллеры умеют в нем работать? Потому что банально вряд-ли у двигателя в режиме без холлов удастся стронуться с места, если вы будете крутить ручку акселератора хоть на долю секунды быстрее, чем мощность и крутящий момент позволят раскрутить двигатель.
Основные виды по принципу строения электродвигателей - это "инраннеры" (inrunner) и "аутраннеры" (outrunner).
Инраннеры - это двигатели, у которых ротор вращается внутри, а статор находится снаружи.
Аутраннеры - это электромоторы, у которых наоборот ротор вращается снаружи, а статор находится внутри.
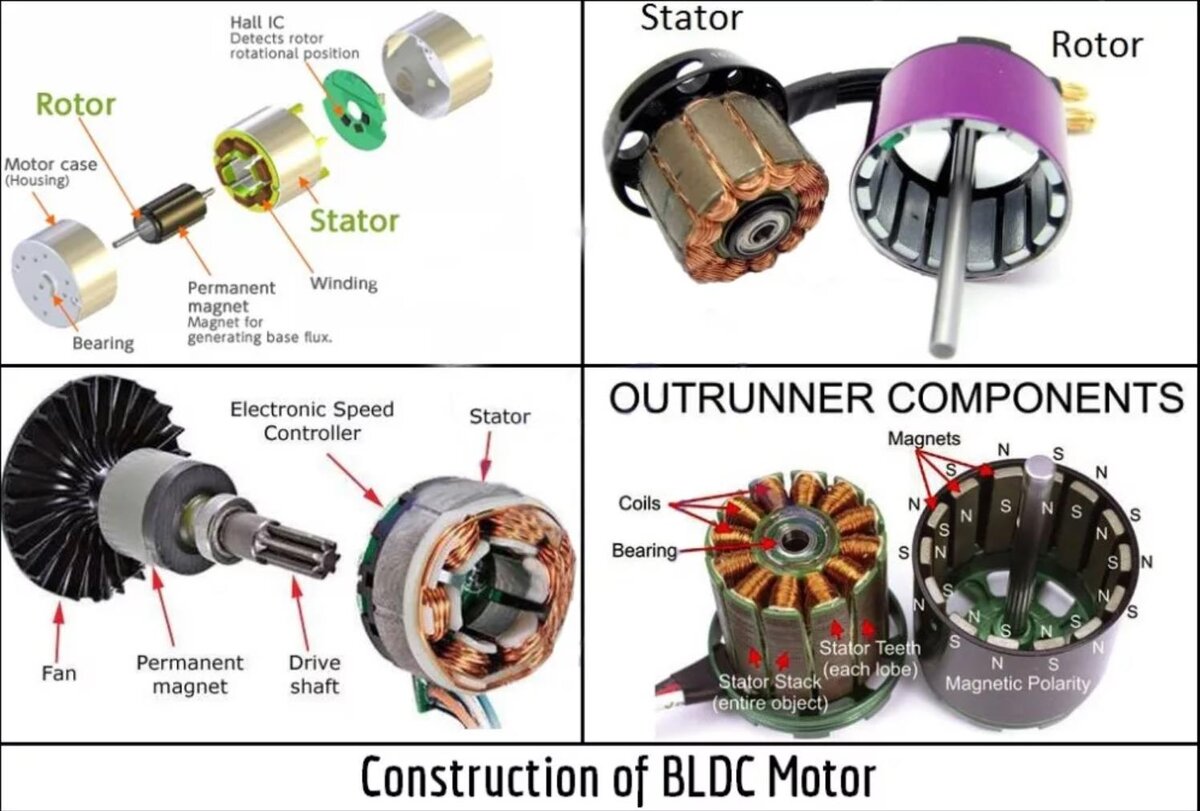
На картинке выше слева мы видим классический BLDC двигатель, который часто используют в качестве кареточных моторов для электровелосипедов или подвесных/центральных двигателей для электрических мопедов, мотоциклов, скутеров. А справа аутраннер, характерный для всех мотор-колес (далее будем называть "МК") и различных радиомодельных моторов квадрокоптеров и иных летательных аппаратов.
Инраннеры в свою очередь делятся на:
- Классические инраннеры BLDC (Brushless DC electric motor - бесколлекторные двигатели постоянного тока)
- Асинхронный (induction motor) электродвигатель - электрический двигатель переменного тока, частота вращения ротора которого не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора. В ряде стран к асинхронным двигателям причисляют также коллекторные двигатели. Второе название асинхронных двигателей - индукционные, это обусловлено тем, что ток в обмотке ротора индуцируется вращающимся полем статора.
- IPMSM (interior permanent magnet synchronous motor) - это синхронный электродвигатель, индуктор которого состоит из постоянных магнитов. Данный тип двигателя представляет собой совмещение технологии асинхронного двигателя с BLDC, являющийся на сегодняшний день самым современным и эффективным. Но об этом позже.
Что касается мотор-колёс, то они бывают 2 типов: редукторные (Geared Hub Motor) и прямого привода (Direct-Drive Hub Motor, директ-драйв, бесщеточный, безредукторный, ДД, DD).
Для начала разберемся с важными базовыми понятиями!!!
- Коэффициент полезного действия (КПД) - характеристика эффективности системы (устройства, машины) в отношении преобразования или передачи энергии) В случае с электродвигателями часть энергия из электрической преобразуется в механическую энергию вращения ротора, а часть энергии теряется в виде выделения тепла и трения в подшипниках.
- Крутящий момент - векторная физическая величина, характеризующая действие силы на механический объект, которое может вызвать его вращательное движение. Измеряется в Нм (ньютон-метрах). Часто вспоминаю одну цитату:
"Лошадиные силы продают автомобиль, а крутящий момент выигрывает гонки." — Генри Форд.
- Мощность в ваттах (Вт), киловаттах (кВт) или лошадиных силах (л.с.)
Это скалярная физическая величина, характеризующая мгновенную скорость передачи энергии от одной физической системы к другой в процессе её (энергии) использования и в общем случае определяемая через соотношение переданной энергии к времени передачи.
Так как статью пишу для новичков, постараюсь упускать сложную терминологию и после классических определений из физики давать простое и нужное только нам объяснение своими словами.
В электротранспорте нам интересна только мощность в Вт и кВт. Бывает электрическая потребляемая мощность, которая вычисляется путем умножение подаваемого на контроллер батарейного тока на напряжение. Например электромотоцикл с батареей, номинальным напряжением 72В в момент ускорения потребляет, предположим, 200А батарейного тока и напряжение в этот момент проседает от нагрузки до 70 вольт (В), то произведение напряжения на силу тока дает нам показатель электрической потребляемой мощности 200А*70В= 14 000 Вт или 14 кВт.
Механическую мощность замерить сложно. Она будет отличаться от электрической потребляемой мощности, т к учитывает потери на преобразование электрической энергии в механическую. Поэтому, разговаривая про электротранспорт, чаще всего мы говорим именно о потребляемой электрической мощности, ведь для замера механической мощности на валу двигателя нужен специальный стенд, а для замера мощности на колесе транспорта нужен уже иной стенд, созданный специально для конкретной задачи и типа транспорта.
И в этот момент важно разобраться с тем, как ведет себя электродвигатель в сравнении с двигателями внутреннего сгорания (ДВС).
Нашел первый попавшийся график зависимости мощности и крутящего момента автомобильного ДВС от оборотов.
Мы видим, что на оборотах до 1500 об/мин коленчатого вала, крутящий момент и мощность двигателя растут практически с нуля. Мы знаем, что холостые обороты двигателей находятся в диапазоне от 600 до 800 об/мин. И чтобы стронуться, автомобилю нужно повышать эти обороты хотя бы до 1000-1200, иначе нехватка мощности и крутящего момента могут привести к тому, что двигатель заглохнет. На определенных оборотах крутящий момент достигает своего пика и далее с ростом числа оборотов начинает снижаться. Так же и мощность достигает пика с ростом оборотов и затем снижается.
Должен заметить, что КПД у современных бензиновых двигателей внутреннего сгорания не превышает 25%, а у дизельных не более 35-40%.
То есть на механические потери на трение и выделение тепла в бензиновых двигателях теряется более 75% выделяемой энергии и только не более 25% на определенных оптимальных оборотах при идеальных условиях преобразуются в механическую энергию движения транспорта.
Что касается электродвигаталей, то их КПД может достигать 95 или даже 98%. Но, снова, не все так просто! Нужно опять обратиться к графику.
Удалось найти в сети таблицу и график лабораторных испытаний распространенного у эндуристов электродвигателя QS 138 70H IPMSM версии.
Как видим, максимальный крутящий момент (красная линия на графике), равный 53,5 Нм (смотрим в таблице под графиком) зафиксирован на 1324 об/мин, при этом крутящий момент на 670 об/мин так-же имеет почти идентичное значение, а с ростом числа оборотов крутящий момент почти линейно снижается: на 3800 оборотах составляет 24 Нм, на 6200 об\мин падает до 0,62 Нм. При этом эффективность (нас интересует значение % эффективности в третьем справа столбце)
670 об/мин - 53 Нм - 59% эффективность
1342 об/мин - 53 Нм- 78%
3823 об/мин - 24 Нм - 93%
6273 об/мин - 0,62 Нм - 29%
Должен заметить, что на голубую линию на графике можно не смотреть, т к производитель схитрил и нарисовал усредненное значение эффективности с учетом 3 значений- эффективность контроллера, мотора и расчетная математическая величина. На деле же честный график любого электромотора выглядит так, что максимальный крутящий момент всегда достигается на минимальных стартовых оборотах двигателя, но при этом его эффективность ужасная и достигает 5-10% до оборотов менее 300, то есть при медленном заползании в гору на минимальных оборотах вы вливаете в двигатель огромное количество энергии, но 90-95% этой энергии выбрасывается в нагрев электродвигателя и только 5-10% преобразуется в механическую энергию движения. Это очень важный нюанс, о котором мало кто когда-либо рассказывает. Но он вам и откроет глаза на преимущества и недостатки того или иного вида электродвигателей!
Кстати, уже после написания статьи нашел замечательную таблицу с честным графиком и лабораторными тестами двигателя Denzel D100, которую можно открыть по ссылке и проанализировать.
Теперь разберемся с этими самыми особенностями, преимуществами и недостатками каждого вида электродвигателей.
Магнитным BLDC двигателям характерен отличный крутящий момент, но довольно узкий диапазон оборотов. Если говорить о классических инраннерах, то BLDC версии, как правило, имеют максимальный кпд в районе 80-85% в диапазоне оборотов от 3300 до 3800 об\мин а максимальные обороты упираются в 4000.
Раскрутить на обороты выше можно только с помощью ослабления магнитного поля. Вдаваться в подробности этого сложного понятия я не хочу. Но на пальцах- это особый алгоритм работы современных контроллеров управления двигателем, способный раскрутить двигатель выше его максимальных оборотов, сильно выводя его из значений КПД и с мизерными значениями остаточного крутящего момента. При этом BLDC двигатели, которые без ослабления крутятся до 3800-4000 оборотов, с ослаблением магнитного поля крутятся максимум до 4200 оборотов.
Асинхронным электродвигателям характерны неплохие значения крутящего момента на старте при очень низкой эффективности, неплохие значения эффективности в среднем диапазоне оборотов в районе от 2500 до 3500 оборотов и резкое падение КПД после 3500 оборотов, хотя сами современные асинхронники способны крутиться и до 6000 и до 10 000 оборотов, вот только в холостом режиме, т к крутящего момента на этих оборотах ничтожно мало. К примеру, мы испытывали электромотоциклы Denzel Rush 4.1 с магнитным BLDC и двигателями и на асинхронном варианте исполнения при езде на скорости 50 кмч аккумулятора 50 ач 72В потребляемая мощность составляет 1,8 кВт и запаса энергоемкости аккумулятора 3,5 кВтч (про аккумуляторы, их форм-факторы, емкость, энергоемкость, токоотдачу, химический состав, правила хранения и эксплуатации я планирую написать отдельную статью) хватает на 100 кмч пробега, то при скорости 60 кмч энергопотребление резко возрастает до 3800 Вт и дальность пробега сокращается почти вдвое.
Полное видео можно посмотреть на моем YouTube канале.
Позже надеюсь перенести на Дзен все эти ролики.
Теперь, что касается IPMSM электродвигателей, как я утверждал выше, это самые современные и самые эффективные электромоторы. Расписывать на пальцах все преимущества не имеет смысла, когда имеется замечательное видео про электродвигатели Tesla и почему на новых моделях компания Илона Маска переходит от асинхронных двигателей к магнитным IPMSM.
Если коротко, то IPMSM двигатели совмещают в себе высокую эффективность во всем диапазоне оборотов, рекордно высокий крутящий момент по сравнению с обоими типами двигателей и максимальную эффективность до 98% в определенном диапазоне оборотов, реальные рабочие эффективные обороты до 5500 об/мин!
Что касается общих преимуществ и недостатков магнитных и асинхронных безмагнитных двигателей, то магниты боятся перегрева. Есть 2 типа используемых в двигателях неодимовых магнитов: одни бюджетные и держат температуры до 80 градусов Цельсия, а другие дорогие и используются только в премиальных моторах. Их можно греть почти до 150 градусов Цельсия. При превышении этих температурных порогов магниты размагничиваются и этот процесс необратимый, эффективность двигателя при перегреве может упасть благодаря ослаблению магнитного поля очень сильно. Поэтому часто вышедшие из строя от перегрева двигатели со перегоранием медных обмоток не имеет смысла перематывать, так как с большой долей вероятности магниты уже потеряли направленность своего магнитного поля и его эффективность.
А вот асинхронные двигатели можно греть пока фазные провода не отпаяются, или пока жив лак на обмотках.
Но я бы не стал записывать это в преимущество асинхронных электромоторов, так как нужно изначально правильно подбирать и настраивать контроллер под двигатель, правильно рассчитывать редукцию, осознавать тонкости эксплуатации электробайка и не ждать от него того-же, что мог дать мотоцикл с ДВС. На электробайках нет смысла ездить со скоростью 100+ км\ч. Существующие батареи просто не способны обеспечить достаточной энергоемкости, чтобы создать электромотоцикл с солидной дальностью пробега на высокой скорости. Этой теме тоже стоит посвятить отдельную статью.
Но, для общего понимания, важно знать, что с ростом скорости, расход энергии увеличивается не линейно, а в прогрессии. Если средний расход двухколесного электротранспорта для поддержании скорости 35 кмч составляет 500 Ватт и с батареей 3000 Втч вы можете ехать 6 часов (3000Втч/500 Вт=6 часов) и уехать за это время на расстояние 210 км, то на скорости 60 кмч на довольно эффективном электровелосипеде расход составит 2500 Ватт и этой же батареи хватит всего на 1,2 часа и пробег 70 км. А на скорости 100 кмч минимальная необходима потребляемая мощность составит 10-12 кВт и этой же батареи хватит всего на четверть часа и пробег максимум 25 км. То есть разница между дальностью пробега в зависимости от скорости движения может составлять десятикратную величину!
Температура нагрева двигателя, при этом, влияет на КПД. С ростом температуры растет сопротивление обмоток, что влечет за собой снова увеличение температуры и дальнейшее падение эффективности и перегревы...
И тут уже есть одно огромное преимущество подвесных моторов (инраннеров) перед мотор-колесами. Это конструкционная особенность.
Взгляните, к примеру на электродвигатель Denzel D7500 IPMSM. Или упоминавшийся выше Denzel D100 Ipmsm. Их обмотки имеют прямоугольное сечение. Они не имеют пустот в заполнении. А если нет воздуха, значит нагревающиеся обмотки моментально передают тепло на алюминиевый корпус двигателя с оребрением. И сам мотор снаружи имеет фактически такую-же температуру, как на самих обмотках. А плотность заполнения таких обмоток еще повышает крутящий момент и эффективность. Выводимое тепло с таких моторов на корпус моментально рассеивается в атмосферу. Такие двигатели очень сложно перегреть. Для этого необходимо продолжительно подавать на них пяти или даже десятикратно превышающую мощность от номинала по режиму S1. (Про режимы номинальной мощности тоже планируется отдельная статья, т к многие не понимают, почему разные электродвигатели могут отличаться по размеру и весу в 4 раза, а производители указывают для них одинаковые значения мощности...)
Теперь давайте посмотрим на компоновку мотор-колеса со снятой крышкой.
При работе электромотора греются всегда обмотки. Они намотаны на стальные сердечники через слой изолятора, имеют круглое сечение, воздушные пустоты. Обмотки греют воздух внутри герметичного мотора, а, как мы помним, воздух- это лучший теплоизолятор и худший проводник тепла. Не даром термос имеет конструкцию сосуда с двойной стенкой, и пространством между стенками заполненным воздухом. Также стальной сердечник под обмоткой прикреплен через стальное кольцо к стальной оси. А сталь имеет коэффициент теплопроводности, при температуре окружающей среды 0 град. (С), равный 63, а при увеличении градуса до 600, он снижается до 21 Вт/м*град. Алюминий, в таких же условиях, наоборот – увеличит значение от 202 до 422 Вт/м*град. То есть, в среднем, коэффициент теплопроводности стали и алюминия отличается в 10 раз. Выходит, что при нагреве обмотки могут очень не эффективно выводить тепло в окружающую среду только через стальной буфер на ось или через нагретый воздух на боковые крышки и магниты, больше никак. Соответственно и разница между температурой обмоток и на поверхности мотора при быстром нагреве обмоток может быть огромной.
Например, если подать мощность, раза в 3-4 превышающую номинальную секунд на 20, то на обмотках мотор-колеса температура за это время может подняться до 150 градусов или выше, а вот снаружи колесо при этом останется холодным. Но если просто постоять на месте минут 5, то раскалится сначала воздух внутри мотора, затем он уже плавно передаст тепло на боковые крышки, магниты, а магниты уже на корпус мотора... То есть мы получаем отложенный эффект - медленный нагрев и очень медленное остывание мотора. Поэтому мотор-колеса нельзя использовать в режимах превышения номинальной мощности даже в 2 раза продолжительно. Важно иметь термоконтроль. То есть либо самостоятельно интегрировать термодатчик, и покупать контроллер, который умеет следить за температурой двигателя, снижать мощность по достижению критичных порогов и отключать мотор по достижению критических порогов температуры!
Конечно, это не значит, что мотор-колеса лишены преимуществ.
К преимуществам мотор-колес прямого привода можно отнести:
- бесшумность движения. Вы никогда не добьетесь такой тишины от центральных моторов без лязга цепи, скрипа ремня и других побочных звуков трансмиссии.
- Высокая надежность благодаря простоте конструкции. На байках с мотор-колесами практически не нужно менять цепи. Да и цепь или ремень вообще могут отсутствовать. Максимум нужно следить за натяжением спиц и изначально выбирать правильную раму с усилителями дропаутов, очень прочные обода с хорошими спицами, ведь на эти узлы приходится большая нагрузка. Благодаря этому пункту всем путешественникам на дальние расстояния или работникам служб доставки можно рекомендовать именно этот тип электродвигателей!
- Дешевизна! ДД МК (мотор-колеса прямого привода) стоят порой в 3 раза дешевле комплекта кареточного мотора для велосипеда при сопоставимой, или даже большей мощности у МК.
- Возможность реализации полноприводного варианта даже у велосипедов. Чаще всего для полного привода в заднее колесо ставят мк прямого привода, а в переднее колесо редукторное. Это позволяет пользоваться преимуществами высокой скорости на ДД МК и при необходимости включать тяговый редукторный мотор в переднем колесе.
- Незаменимость и простота монтажа в гусеничной технике. Не нужны никакие промвалы, редукторы, ШРУСы и муфты. Вы просто ставите мотор-колесо в гусеницу, которое будет выполнять роль ведущего катка. Есть замечательный российский разработчик и производитель гусеничной техники. Ссылка на его YouTueb канал. Обязательно загляните!
- Высокая эффективность на высокой скорости, минимальные потери на трение! Как правило ДД МК эффективны на высоких скоростях. Хотя бывают разные типы намотки обмоток - тяговая или скоростная, но для тех, кому нужна относительно высокая скорость при езде по ровным дорогам, МК подойдет лучше, чем центральные моторы, т к потери на трение в трансмиссии почти отсутствуют, а они могут составлять от 2 до 20% на транспорте с различными ее типами (цепная, ременная передача, шестеренчатая кпп или редуктор, карданный вал)
Ну а теперь минусы МК:
- проблемы с нагревом и охлаждением, описанные выше.
- невозможность комфортно менять передаточное соотношение. Для того, чтобы сделать байк для горной местности, который будет двигаться без перегревов и сделать упор на тягу, динамичный разгон, а не максимальную скорость, единственным вариантом изменения передаточного числа является уменьшение размера обода колеса. Поэтому мы часто видим несуразные проекты с мотор-колесами, когда переднее колесо на байке большое, а сзади маленькое.
- Неподрессоренная масса. Точнее соотношение подрессоренной к неподрессоренной массе. Это очень важный пункт, который нельзя пропускать и благодаря которому все любители быстрой внедорожной езды даже не допускают мысли о байке с мотор-колесом. Ни одна самая лучшая и дорогая амортизационная подвеска не способна правильно работать с тяжелым мотор-колесом.
Лучше всего причины объясняет старый наглядный ролик. Обязательно посмотрите!
Для меня эта и вторая причина, описанная выше, являются определяющим фактором в названии моего канала, моего проекта. Потому что мне важна управляемость, безопасность, легкость в управлении, возможность ездить по горным тропам и бездорожью как вверх, так и вниз!
Часто поклонники МК усмехаются или спорят с этим фактом, но я скажу так- если бы это было не так важно, то во всех мировых электромобилях, будь то Tesla, BYD, BMW или иной другой не использовали бы приводные валы, а ставили мотор-колеса. Та же история с серийными серьезными мотоциклами. Любой производитель всеми возможными способами стремится уменьшить неподрессоренную массу. И в мире производителей мототехники уменьшение неподрессоренной массы на 100 грамм считается прорывом, потому что эти 100 грамм позволяют не чувствовать неровности на асфальте на высоких скоростях. Потому что проезд внезапно обнаруженного "лежачего полицейского" или кочки на дороге на байке с низкой неподрессоренной массой не приведет к каким-либо последствиям, легкая подвеска просто "оближет" любую неровность без каких-то последствий, а вот байк с тяжелым мощным мотор-колесом может отправить райдера во фронт-флип или падение из-за того, что тяжелое колесо подбросит. Отсюда же вытекает еще одна беда - если поймать яму с острыми краями, коих миллиарды на дорогах России, байк с тяжелым мк и резину порвет и любой самый прочный обод сломает в то время, как байк с низкой неподрессоренной массой проедет эту яму без последствий на той же скорости. Были люди из нашего сообщества, которые раньше были ярыми сторонниками мотор-колес, но после первого же совместного катания понимали всю правду и пересаживались на байки с центральными моторами. Но тут определяющий фактор, что жили мы в Пятигорске- горной местности.
- гироскопический эффект. Это не такое страшное физическое явление, но тем не менее посмотрите несколько роликов, которые его наглядно показывают на конкретных примерах.
Ролик 1 - русская учительница физики в университете США.
Ролик 2 - велосипед с автопилотом, который держит равновесие за счет эффекта гироскопа
Ролик 3 - двухколесный транспорт, который не падает на бок даже если в него врезаться.
Да, все это эффект гироскопа. Смысл его в том, что тяжелый маховик, раскрученный до высокой скорости, не позволяет быстро изменить наклон оси этого маховика, он очень сильно сопротивляется. Настолько сильно, что стальной блинчик, диаметром 20 см, раскрученный до 7-10 тыс оборотов в третьем ролике, позволяет удерживать тяжелый байк в горизонтальном положении даже когда его толкают со всей силы. А если у вас в колесе мотор-колесо киловатт эдак на 10, весом под 30 кг, то вы представляете, какой у него гироскопический эффект и как на таком байке обруливать резко возникшее препятствие? Вы его даже не сможете наклонить на бок своим весом, он будет сопротивляться!
- Болячки с перебиванием проводов. Конструктивная особенность мотор-колес заключается в том, что и фазные провода и провода датчиков холла заходят в двигатель через пустотелую ось. То есть если у вас электробайк с амортизационной подвеской, провода все-время перегибаются вместе с работой маятника от каждого его микродвижения и рано или поздно они переломятся с возможным замыканием пары фазных проводом и выходом из строя контроллера. А обычный демонтаж колеса при проколе камера становится проблемой, т к приходится откреплять зафиксированную проводку, либо со временем также переламывается или перетирается место входа проводки в ось. От нагрева также у многих отпаиваются фазные провода от обмоток, либо выходят из строя датчики холла. Таких проблем на инраннерах не замечено.
Немного о редукторных мотор-колесах.
Они, как правило, имеют меньшую мощность, размер и вес. Как правило это 500 Вт, максимум 1 кВт при весе от 1,4 до 4,5 кг. Это заметно ниже МК ДД, ведь их вес начинается от 7-8 кг.
Редукторные МК состоят из небольшого электромотора и планетарного редуктора с обгонной муфтой. Их максимальная скорость ниже, чем у прямого привода за счет того, что планетарный редуктор преобразует, к примеру, 10 оборотов мотора в 2 оборота колеса (передаточное число 1:5), при этом ровно в 5 раз возрастает величина крутящего момента. И в итоге мы получаем, что динамика разгона 500 Вт редукторного МК может быть выше, чем динамика разгона 1500 Вт МК прямого привода. Но максимальная скорость редукторных МК, как правило, ограничена 45-50 кмч именно за счет того, что двигатель на этой скорости уже развивает свои максимальные обороты и быстрее крутиться уже не способен.
И плюс и минус МК редукторного мк в обгонной муфте. Этот вид мотора позволяет получить свободный накат, как на обычном велосипеде, но рекуперативное торможение невозможно. Это является плюсом, когда такой мотор используется для полноприводных электровелосипедов, ведь оно не препятствует свободному качению, когда не задействовано.
А вот МК прямого привода подвержены магнитным залипаниям, которые ухудшают свободный накат!
Что касается центральных моторов, то мы определили список преимуществ:
- Практически моментальное отведение тепла от обмоток на алюминиевый корпус двигателя при достаточном обдуве в движении позволяет "вкачивать" в электромотор мощности в пике до 5-10 раз превышающие номинальную. Быстро охлаждается, если нагрели. Достаточно плеснуть водички и можно снова в путь. А если хочется еще сильнее ускорить процесс передачи тепла с обмоток на оребрение мотора, то можно залить обмотки специальным электроизоляционным теплопроводным компаундом, или купить готовый залитый мотор. К примеру, компания Denzel предлагает своим покупателям моторы D5500 ipmsm с залитыми обмотками за доплату.
- Возможность изменять передаточное соотношение.
Тут огромные возможности для творчества. Существуют готовые двигатели, как Denzel GB200, которые уже собраны на базе двс двигателя с 4 ступенчатой механической коробкой передач. И этот двигатель легко установить на раму от многих китайских эндуро байков. При этом он будет иметь дикий крутящий момент на колесе до 800 Нм на 1 передаче.
На моем YouTube канале есть ролик про электробайк Denzel Rush 4 с подобным двигателем. В начале ролика видно, как байк без сцепления со 2 передачи на асфальте срывается в пробуксовки с визгом резины и едет в таком режиме метров 15.
Кто не видел, посмотрите видео по этой ссылке.
К слову, я являюсь представителем компании Denzel в России и подобные двигатели и контроллеры, а также электробайки можно приобрести у меня.
Для связи Telegram или WhatsApp +7-918-885-09-25 (Григорий)
Если говорить о велосипедных комплектах электрификации, то они, в отличии от мотор-колес, позволяют пользоваться передачами на велосипеде. Будь то обычная многозвездочная кассета, либо планетарная втулка.
Вчера я как раз перенес на Дзен свой ролик про первый мощный 3 кВт электровелосипед с планетарной втулкой.
Также под каждую задачу при наличии центрального мотора люди подбирают редукцию соотношением ведущей к ведомой звезде. Любители эндуро, которые собирают серьезные проекты, составляющие и обходящие почти во всем, кроме дальности пробега, двс байки, часто используют передаточное соотношение 1:8 или даже 1:10 путем установки промежуточного вала. Да и на известном всем электробайке Sur-Ron необходимая редукция реализована таким-же методом- первая ступень редукции ременная от двигателя к шкиву на промежуточном вале, а с противоположной стороны промвала установлена звезда, которая уже цепью соединена с ведомой звездой на колесе.
- отсутствие влияния на неподрессоренную массу. Если двигатель установлен соосно маятнику, или находится на раме, то он не оказывает никакого влияния на работу подвески.
- большая эффективность во всем диапазоне оборотов. Если мы говорим об IPMSM электродвигателях, то рабочий диапазон оборотов большинства из них упирается в 5500, а обороты BLDC мотор колес-ограничены 4000. Насколько я знаю, физически невозможно перенести преимущества IPMSM двигателя в конструкцию мотор-колеса. При этом крутящий момент ipmsm двигателей на старте равен или даже превосходит значения BLDC или асинхронных двигателей. А учитывая, что максимальные обороты выше и есть возможность оба варианта байка подогнать передаточным числом под одну и ту же максимальную скорость, мы получаем крутящий момент у IPMSM двигателей выше на 30% за счет большего передаточного соотношения. Либо при равном передаточном числе получаем максимальную скорость выше на 30%, нежели у BLDC двигателей.
Таким образом получаем цепочку взаимосвязей, сказывающиеся на итоговой эффективности байка, его динамике и расходе энергии, дальности пробега: греется меньше-эффективность выше, передаточным числом подгоняем под нужную максимальную скорость, получаем смещение оборотов кпд к нужной крейсерской скорости и движению на заданной скорости в оборотах максимального кпд двигателя с минимальным нагревом и расходом энергии. Таким образом можно не только компенсировать потери на трение в трансмиссии по сравнению с МК прямого привода, но и получить лучший расход энергии, особенно если режим езды с постоянными разгонами и торможениями.
А дальше список минусов инраннеров:
- Высокая цена. Особенно если речь идет о комплекте для велосипеда, то из-за сложности конструкции с редуктором, обгонными муфтами (фривил/ freewheel), системами с шатунами двигатели на велосипед фактически равны по цене комплектам для электромотоциклов, которые выдерживают пиковые нагрузки в десятки раз выше. Не говоря о том, что по цене 1,5 кВт комплекта кареточного мотора Bafang BBSHD можно приобрести 2 или 3 мотор-колеса на те же 1500 Вт.
- Износ трансмиссии. Тут все просто. Цепи и звезды изнашиваются быстрее, чем на байках с ДВС, т к испытывают больший крутящий момент. К примеру большинство эндуро ДВС 250 кубовых мотоциклов имеют максимальный крутящий момент на валу в районе 25-30 нм. В то время как на валу IPMSM электродвигателей с номинальной мощностью 3-4 кВт крутящий момент достигает 60-80 Нм уже с первого оборота двигателя. Как следствие, меньшая надежность.
- Сложность в установке. Не скажу, что велосипедные кареточные комплекты ставить сложнее, чем мотор-колеса, но вот установить в мотоцикл IPMSM электродвигатель- это проблема, ведь нужно придумывать редуктор или кпп. Двигатель занимает место в раме, сжирая пространство, которое могла бы занять батарея, если сравнивать с МК.
Подбор рам или "доноров" как для электровелосипедов, так и для электромотоциклов, ощутимо уже, чем при выборе мотор-колеса. Помимо проблем с нехваткой места под батарею может возникнуть проблема с размещением кареточного мотора на качающимся маятнике, если каретка является с ним единым целым. Да и клиренс на велосипедах с кареточными моторам становится ниже исходного.
Подводя итоги, могу сказать, что если вы цените быструю безопасную езду по пересеченной местности, маневренность, работу подвески, возможность прыгать на дропах и трамплинах, заниматься эндуро, кроссом или мото триалом, то вам подойдет только центральный мотор!
Если вы хотите электробайк для дальних путешествий, поездок в полной тишине, максимальную надежность, минимальное количество заморочек при постройке и обслуживании байка, то вам подойдет мотор-колесо прямого привода.
Если хотите собрать первый недорогой и легкий электровелосипед/мопед со скоростью движения до 45 кмч, байк для повседневной езды с минимумом шума, отлично сбалансированного в плане надежности и безопасности, приятной динамикой и плавностью движения, то ваш выбор должен быть в пользу редукторного мотор-колеса, как и единственно верный, на мой взгляд, выбор для детей или пожилых людей, желающих иногда и педали покрутить, но имеющих возможность ездить как на мопеде, не включая мускульную тягу.
Если хотите построить полноприводный электровелосипед, то назад ставим мк прямого привода, либо кареточный мотор, а в переднее колесо редукторный мотор. Но выбор рамы и вилки должен быть очень внимательным. Рама должна быть прочной, особенно в месте стыка рулевого стакана к трубам, ведь ни вилка, ни рама не рассчитаны на такую нагрузку, когда колесо тащит за собой велосипед. А дропауты на вилке обязательно должны быть усилены стальными пластинами, иначе мотор-колесо рано или поздно гарантированно оторвет дропаут вилки и уедет вперед само, отправив райдера в нокаут головой в землю. По этой причине я не советую монопривод в переднем колесе! Подчеркну, что в переднее колесо я бы советовал ставить только в дополнение к мотору сзади для полного привода!
Если вы на реабилитации после травм или проблем с опорно-двигательным аппаратом, или просто любите крутить педали, то смотрите в сторону кареточных моторов с торк сенсором и мощностью до 500-750 ватт!
Если вам нужны только эмоции, вы живете в горной местности, любите ковыряться с техникой и хотите постоянно ощущать почти мотоциклетную динамику, сидя на легком велосипеде, то ваш выбор - мощные кареточные комплекты Cyclone!
Если есть дополнения, вопросы или рекомендации, буду рад комментариям! Это моя первая статья подобного плана.
Если информация была полезна, прошу мотивировать меня лайками и комментариями на новые съемки видео и объемные тексты, основанные на личном опыте и опыте нашей группы единомышленников.
Всем добра и мирного неба!