Продолжаем серию статей, посвященных компараторам в измерительных приборах НПФ КонтрАвт. Ранее мы дали определение компараторам и привели основные функции компараторов.
В данной статье мы разберем для чего в компараторах вводят гистерезис.
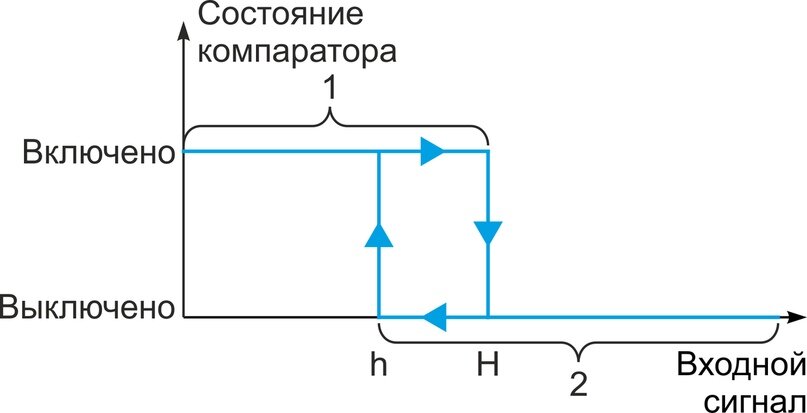
В нашей первой статье мы упомянули, что в области порогов h и H в поведении компаратора может наблюдаться гистерезис и состояние выхода компаратора в этом случае зависит не только от соотношения измеренного сигнала и порогов, но и от предшествующей истории, т.е. от того, каким путем измеренный сигнал приближается к порогам.
Для чего же вводят гистерезис в компараторы?
Зачем нужен гистерезис в компараторах
Причина № 1
Как правило, измеренный сигнал имеет как регулярную составляющую (постоянную или плавно меняющуюся), так и случайную, вызванную действием внешних случайных электромагнитных помех.
В отсутствие гистерезиса (или при слишком малой величине его зоны), при подходе измеренного сигнала к пороговому значению случайная компонента вызывает многократное срабатывание компаратора, что нежелательно в системе (обгорание и износ контактов пускателя, хаотические срабатывания различных устройств и проч.).
Однако, если выбрать зону гистерезиса (H-h) чуть больше, чем размах случайных изменений измеренного сигнала, то компаратор будет срабатывать только один раз, повторных возвратов в исходное состояние не будет. Таким образом, исключаются случайные срабатывания компаратора, его состояния фиксируются более четко.
На практике с этим чаще всего сталкиваются в системах сигнализации и регулирования.
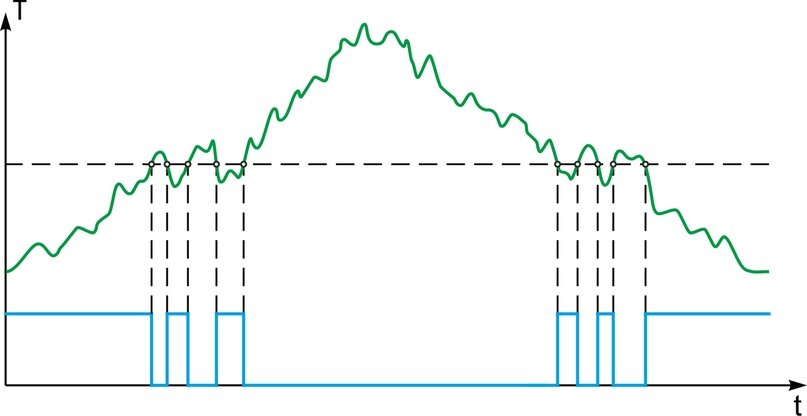
В задаче сигнализации отсутствие гистерезиса приводит к многократному срабатыванию сигнализации вблизи порога (см. рисунок 2). Если сигнализация управляет смежными устройствами и системами, то ложные и частые срабатывания будут крайне нежелательны. Кроме того, они вводят в заблуждение оператора. Наличие гистерезиса с оптимальной зоной обеспечивает однозначное срабатывание сигнализации (cм. рисунок 3).
В задачах позиционного регулирования гистерезис предотвращает частое и хаотическое переключение силового коммутационного элемента при переходе через уставку за счет шумоподобного изменения измеренного сигнала (рисунок 2). В случае больших мощностей это негативно сказывается как на электросети, так и на работе электромагнитных пускателей (обгорание контактов, износ, залипание контактов, неуправляемый нагрев, сокращение ресурса и т.п.) Наличие гистерезиса также делает переключение более четким (cм. рисунок 3).
Причина № 2
Существует и другая причина, по которой следует применять гистерезис в системах двухпозиционного регулирования.
Свойства системы могут быть таковы, что период срабатывания позиционного регулятора будет слишком малым. Это (так же как и влияние помех) приводит к частому срабатыванию коммутационных элементов с названными ранее последствиями.
В этих случаях специально увеличивают зону гистерезиса, чтобы увеличить период переключения. Однако, надо учитывать, что увеличение зоны гистерезиса (𐊅>𐊅0 + зона гистерезиса) неизбежно приводит к увеличению размаха колебаний, ухудшает точность регулирования. В таких ситуациях вопрос выбора величины зоны гистерезиса - это вопрос компромисса между точностью регулирования и повышением надежности и ресурса системы.
Причина № 3
Существует ряд производственных задач, в которых введение гистерезиса в работу компаратора позволяет реализовать логику работы системы управления.
Например, в системах водоснабжениями (типа “Башня Рожновского”) точность вообще не играет ключевой роли, важно, что исполнительный механизм - насос - “не любит” частого включения/выключения.
При этом накопитель позволяет реализовать необходимое редкое включение/выключение насоса с помощью гистерезиса.
Выводы:
Таким образом, введение гистерезиса в компараторах необходимо в следующих случаях:
- Для устранения многократного срабатывания компаратора под действием быстрых случайных помех, как следствие устранения хаотических срабатываний различных устройств в системе, увеличение ресурса коммутационных и исполнительных устройств.
- Преднамеренное увеличение периода переключения компаратора в задачах позиционного регулирования. Обеспечивает увеличение ресурса и надежности системы, но ухудшается точность регулирования.
- Для реализация различных алгоритмов работы систем автоматики.
В следующих публикациях мы подробнее разберем прочие особенности работы компараторов. Следите за обновлениями материалов!
НПФ «КонтрАвт», Нижний Новгород
тел./факс: (831) 260-13-08
e-mail: sales@contravt.ru