Ожидается, что на борту Международной космической станции потребуются значительные средства для выхода в открытый космос. Эти работы по техническому обслуживанию и строительству очень опасны. Космонавты должны тщательно готовиться, прежде чем покинуть космическую станцию. Выйдя в открытый космос, экипаж судна должен быть крайне осторожен, чтобы не повредить костюм.
Сектор технологий роботизированных систем в настоящее время занимается разработкой роботизированных систем для снижения нагрузки на экипаж космической станции, а также для использования в качестве средств быстрого реагирования.
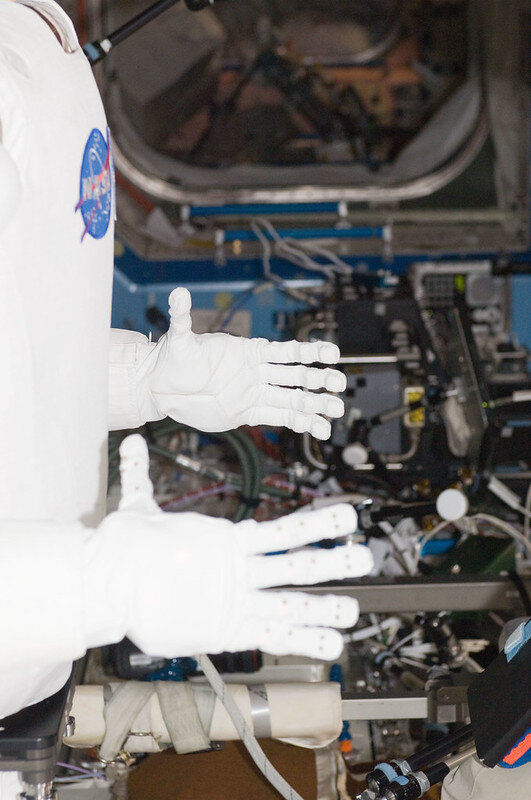
Одна из таких систем, Robonaut, разрабатывается и создается для взаимодействия с внешними системами космических станций. С этой целью рука робота Robonaut обеспечивает высокую степень антропоморфной ловкости.
За последние два десятилетия было разработано много принципиально новых роботизированных рук. Эти устройства позволяют роботу захватывать и манипулировать объектами, не совместимыми с робототехникой. В то время как несколько были разработаны для использования в космосе, а некоторые даже испытаны в космосе, ни один такой робот не летал в условиях открытого космоса.
Роботизированная рука - одна из нескольких устройств, находящихся на стадии разработки для использования в космосе, по размеру и возможностям наиболее близка к руке астронавта, подходящей для космических экспедиций.
Космическая совместимость
Пространственная совместимость отделяет Robonaut от многих других. Все материалы компонентов соответствуют ограничениям по газообразованию для предотвращения загрязнения, которое может создавать помехи для других космических систем.
Детали, изготовленные из различных материалов, имеют допуски для приемлемой работы в условиях экстремальных перепадов температур, наблюдаемых в условиях открытого космоса. Все детали сконструированы с использованием проверенных космических смазочных материалов.
Дизайн руки Robonaut
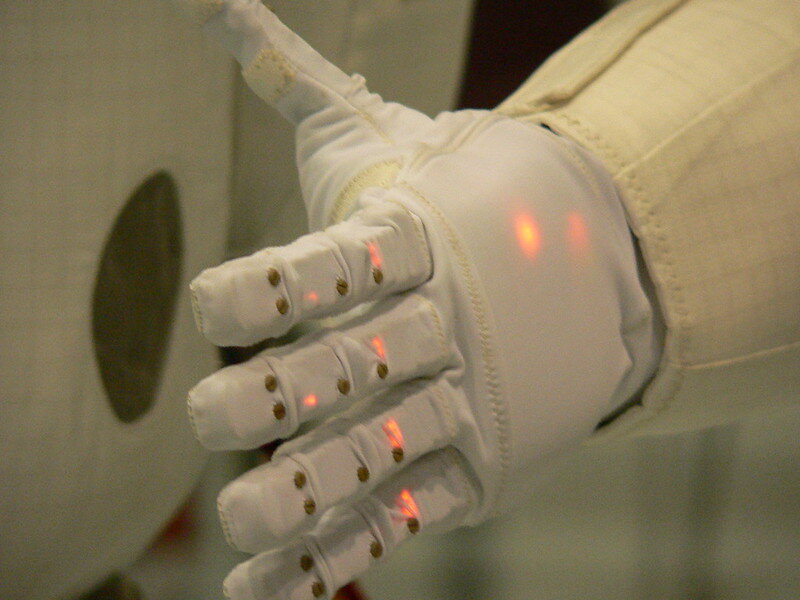
Рука имеет в общей сложности четырнадцать степеней свободы. Она состоит из предплечья, в котором размещены двигатели и приводная электроника, двух степеней свободы запястья и пяти пальцев, двенадцати степеней свободы руки.
На предплечье, которое имеет в основании четыре дюйма в диаметре и приблизительно восемь дюймов в длину, находятся все четырнадцать двигателей, 12 отдельных печатных плат и вся проводка для руки.
Для того чтобы соответствовать размеру перчатки астронавта, двигатели монтируются снаружи руки, а механическая энергия передается через гибкий приводной механизм.
Чтобы избежать проблем, связанных с сухожилиями, рука использует гибкие валы для передачи мощности от двигателей предплечья к пальцам. Вращательное движение гибких валов вручную преобразуется в линейное движение с помощью небольших модульных узлов свинцово-винтовых соединений.
"Ловкие" пальцы
Три степени свободы ловких пальцев включают крепление пальца, вилку, два проксимальных полукорпуса сегментов пальца, разъединяющий узел звена, средний сегмент пальца, дистальный сегмент пальца, два соединительных звена и пружины для устранения зазора.
Основной сустав пальца имеет две степени свободы: угол рысканья и угол наклона. Эти движения обеспечиваются двумя ведущими винтовыми узлами, которые работают дифференцированно.
Короткие кабели, выходящие из свинцовых винтовых узлов, крепятся в закругленные пазы в проксимальных сегментах полуоболочек пальцев. Использование кабелей устраняет значительное количество соединений, которые в противном случае были бы необходимы для соединения двух степеней свободы основания.
Скругленные пазы контролируют радиус изгиба соединительных кабелей от винтовых сборок и также позволяют поддерживать почти постоянный рычаг на протяжении всего диапазона движения пальцев. Поскольку соединительные кабели короткие и их радиус изгиба контролируется, они действуют как жесткие штанги в рабочем направлении и как пружины в противоположном направлении.
Другими словами, отношение длины кабеля к его диаметру такова, что кабели достаточно жесткие, чтобы разжать палец, но если палец соприкасается или ударяется об предмет, то он сгибается.
"Захватывающие" пальцы
Захватывающие пальцы имеют три ступенчатых шарнира, каждый с 90 градусами хода. Пальцы приводятся в действие одним узлом свинцового винта и используют тот же паз кулачка в проксимальном полукорпусе пальца, что и "ловкие" пальцы.
В этой конфигурации каждый шарнир пальца замыкается примерно под одинаковым углом. Альтернативная конфигурация пальца, которая в настоящее время оценивается, заменяет дистальную связь жесткой пружиной ограниченного хода, что позволяет пальцу лучше соответствовать при захвате предмета.
Этот антропоморфный робот предназначен для взаимодействия с интерфейсами экипажа в открытом космосе, что поможет увеличить количество роботизированных операций, доступных для Международной космической станции.
Созданы механизмы, которые позволяют роботизированной руке Robonaut достичь возможностей, близких к возможностям астронавта, носящего перчатку, подходящую для работы в космосе.