Сегодня нам кажется, что роботы – это изобретение исключительно нашего времени, 20 века. Многие из нас будут удивлены, какие чудеса инженерии создавались учеными древности. Конечно, многие нам возразят, что у этих механизмов не было обратной связи, они не получали информации о внешнем мире и никак не изменяли свою изначально заложенную программу действий. Но в них была заложена одна, но очень важная особенность, их можно было программировать на определенную последовательность действий.
Итак, начнем мы наше путешествие по истории робототехники с… нет, не с колыбели европейской цивилизации Древней Греции, а с Древнего Египта. По свидетельствам современников, к сожалению, ничем более не подкрепленным, в конце 2-го тысячелетия жрецы Древнего Египта изготовили статую, которая поднятием руки указывала на наследника фараона во время религиозных церемоний. Примерно в это же время в Китае были созданы первые прототипы роботов, приводимые в действие силой взрыва пороховых зарядов.
Ученые Древней Греции не только строили первых роботов, но и пытались сформулировать законы механики, создать новые виды приводов и передач, другими словами, делали попытки превратить отдельные удачные эксперименты в научное знание и полезную для общества практику. Хотя это, пожалуй, и был единственный период в истории до 20 века, когда механика и первые начатки робототехники использовались с практическими целями, эпоха Средневековья и Возрождения вновь вернулась к конструированию забавных механических безделиц.
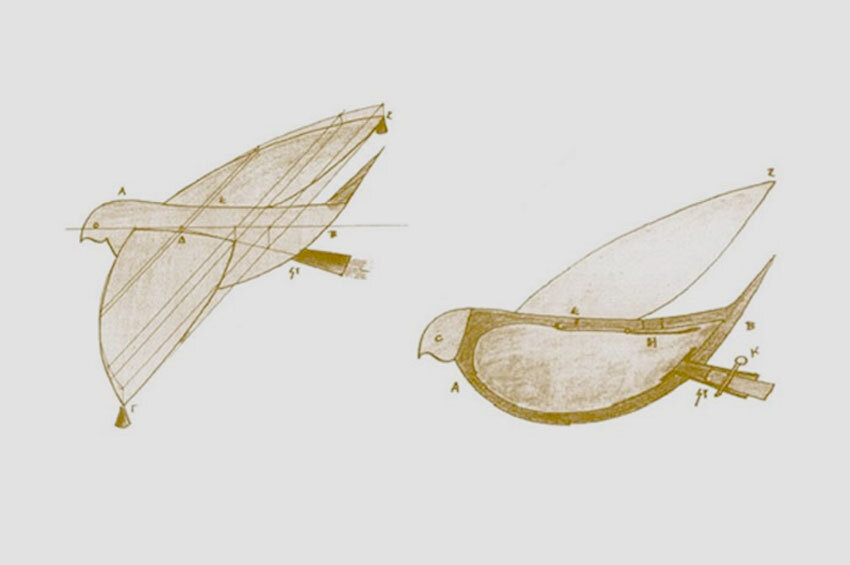
Говоря о достижениях древних греков, необходимо начать с математика и механика Архита Тарентского, который в 5 веке до н.э. сконструировал механического голубя.
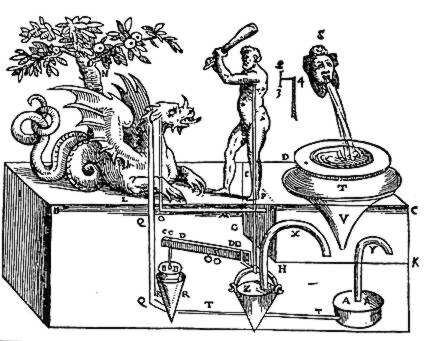
На знаменитом Фаросском маяке в городе Александрия были установлены механические фигуры девушек, которые могли указывать направление ветра и движение Солнца и Луны, отсчитывали время и во время шторма или тумана указывали направление при помощи громкого рева труб. Еще один выдающийся ученый Древней Греции Герон Александрийский разработал тележку, которая вывозила на сцену механизированных марионеток. Управление тележкой осуществлялось при помощи колышков и наматываемой на них веревки, при этом изменяя расположение колышков можно было задать для тележки разную траекторию движения. Кроме нее Герон создал: автомат для продажи «священной воды», автоматическую масляную лампу, самоходный шкаф с регулируемой скоростью передвижения, автоматический театр.
Многие исследователи робототехники добавляют к изобретения греков и коготь Архимеда. Архимед, безусловно, был величайшим инженером и механиком своего времени, однако считать коготь Архимеда, работающий на основе рычага и шкивов, относящимся к робототехнике, было бы слишком вольным.
В эпоху Средневековья практически все образцы роботов были скорее упражнениями для ума отдельных гениев, чем сколько-нибудь полезными машинами. Так видный ученый и теолог Средневековья Альберт Великий разработал «механическую служанку», которая могла самостоятельно передвигаться и воспроизводить человеческую речь. Средневековый архитектор Виллар де Онекура, живший в 13 веке, в одном из своих трудов описал механических зверей, а также фигуру ангела, поворачивающуюся вслед за движением Солнца. К этому же времени относится и рассказ об увеселительном саду графа Роберта II д’Артуа, заполненном автоматическими обезьянами, птицами и механическими фонтанами.
Параллельно средневековой Европе, начатки робототехники появились и на Востоке. Так во дворце Византийского императора около трона находились два металлических льва, которые ревели и били хвостами, а в кронах находились механические птицы, певшие и щебетавшие на разные голоса. Братья Бану Муса Мухаммад, Ахмад и аль-Хасан из Багдада создали в 9 веке механического флейтиста, однако никакого изображения или описания их механизма не сохранилось. Также существует описание некоего «железного мужика» при дворе царя Ивана Грозного, сделанное голландским купцом Йоханом Вемом. Согласно его описания этот механический человек мог подавать царю чашу с вином и кафтан, подметал пол, кланялся гостям и даже «побивал медведя». Что-то подобное было сделано и гением инженерной мысли, великим Леонардо да Винчи, создавшего механического рыцаря, способного двигать руками и шеей, садиться и открывать рот.
Изобретение пружины и маятника придало новый импульс развитию автоматических механизмов, так называемых, автоматонов. Так в 18 французским механиком и изобретателем Жаком де Вокансоном разрабатывались различные механические игрушки, в том числе и человекоподобные. Самыми известными из них являются механические утки, которые могли бить крыльями, летать и клевать рассыпанный корм, а также механический человек, игравший на флейте.
Еще одним известным разработчиком механических игрушек 18 века был швейцарец Пьер Жаке-Дроз. Наиболее известными его механизмами были: пишущий мальчик, девочка, играющая на органе и рисующий мальчик. Пишущий мальчик – самый сложный автомат мастера, состоящий из 6000 деталей. Робот мог писать текст длиной до 40 букв, при этом он мог быть запрограммирован на написание совершенно разных текстов. Для письма мальчик макает гусиное перо в чернильницу, отряхивает с него лишние чернила. Глаза фигуры двигаются вслед за пером, а голова поворачивается к чернильнице, когда мальчик опускает в нее перо.
Подобные автоматоны изготавливались и в Японии. Широко известным примером из страны Восходящего Солнца является девушка, стреляющая из лука.
Но, как уже было сказано выше, подобные машины носили всегда развлекательный характер и не имели никакой практической пользы. Но уже в начале 19 века стали появляться первые машины, имеющие сугубо практические утилитарные цели. Так в 1808 году французским ткачом Жозефом Мари Жаккаром был изобретен ткацкий станок, программируемый с помощью перфокарт.
Именно текстильная промышленность и металлообработка стали в 19 веке флагманом автоматизации. Конечно, никаких роботов в этот период сконструировано не было, однако, научно-техническая мысль окончательно повернулась от разработки механических игрушек к созданию по-настоящему полезных и практичных машин. Можно сказать, что весь 19 век был временем накопления качественных предпосылок к появлению настоящей робототехники в 20 веке.
Первым роботом в современном понимании этого термина был «Герберт Телевокс». Человекоподобная машина, разработанная в 1928 году американским инженером Роем Уэнсли. Герберт Телевокс мог открывать окна и двери, отключать духовку и другие электроприборы, при этом он был первой в своем роде машиной способной выполнять звуковые команды.
Примерно в это же время, а именно в 1929 году японский изобретатель Макото Нисимуро конструирует антропоморфный механизм, способный выполнять руками довольно сложные манипуляции. Кроме того англичанином Уильямом Ричардсом в 1928 году был разработан человекоподобный механизм, который мог также двигать руками и при этом отвечать «осмысленно» на ряд не сложных вопросов. К началу 20 века это были разработки, поражавшие воображение.
Однако с тех пор развитие человекоподобных роботов замедлилось и технический прогресс пошел по пути создание роботов-манипуляторов. Возможно, это время, т.е. весь 20 век был подобно веку 19 временем накопления качественных предпосылок к появлению совершенных антропоморфных роботов, которые, наконец, войдут в нашу жизнь в 21 веке.
Познакомиться с промышленными роботами 21 века вы можете на нашем сайте www.alfamatic.ru.