Всем добрый день!
В предыдущей статье Гусеничный снегоуборщик. Как все начиналось я рассказал о том, как зародилась идея постройки платформы, ее первая версия и с какими проблемами пришлось столкнуться при постройке.
Собрав весь полученный опыт, набравшись новых знаний на специализированных форумах, посмотрев подобные проекты радиоуправляемых моделей, было решено сделать свой вариант.
Версия 2.0
Компоненты платформы:
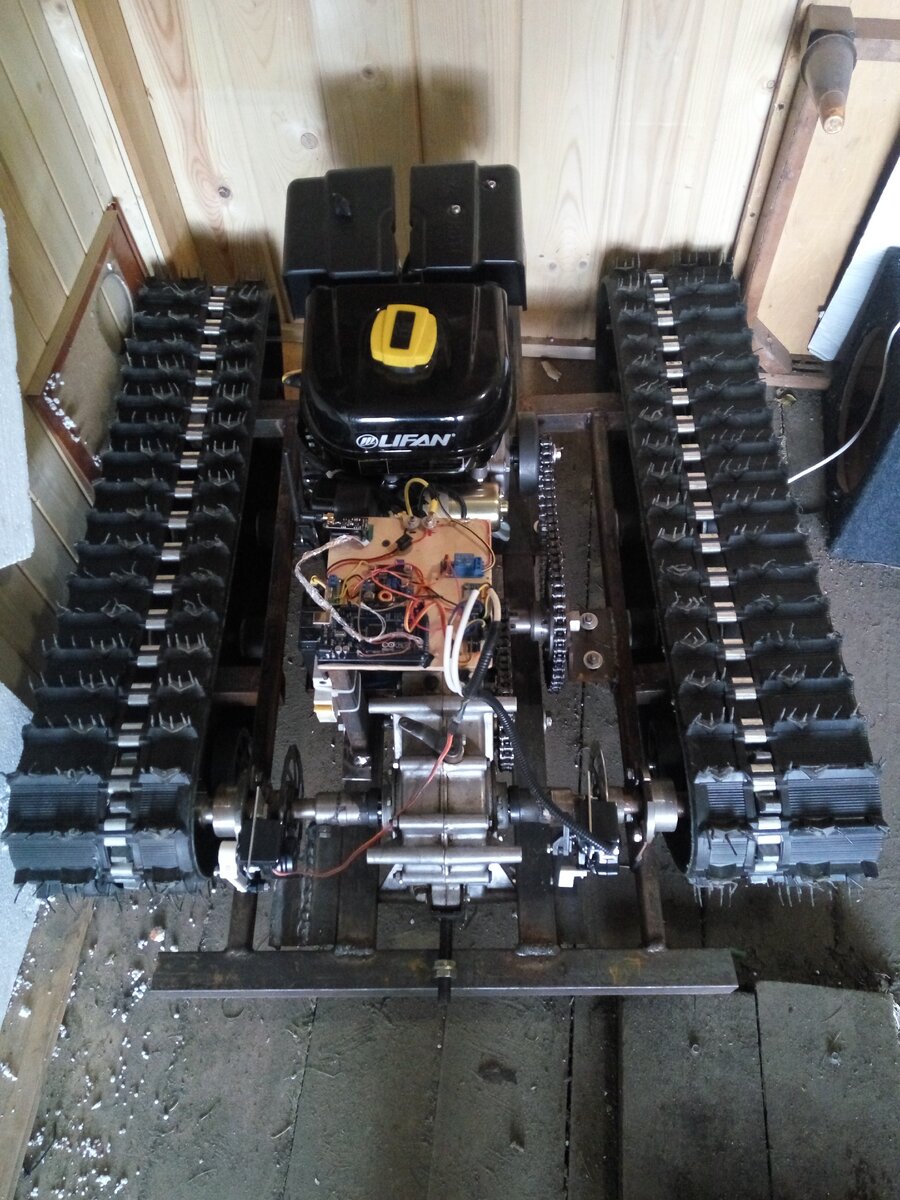
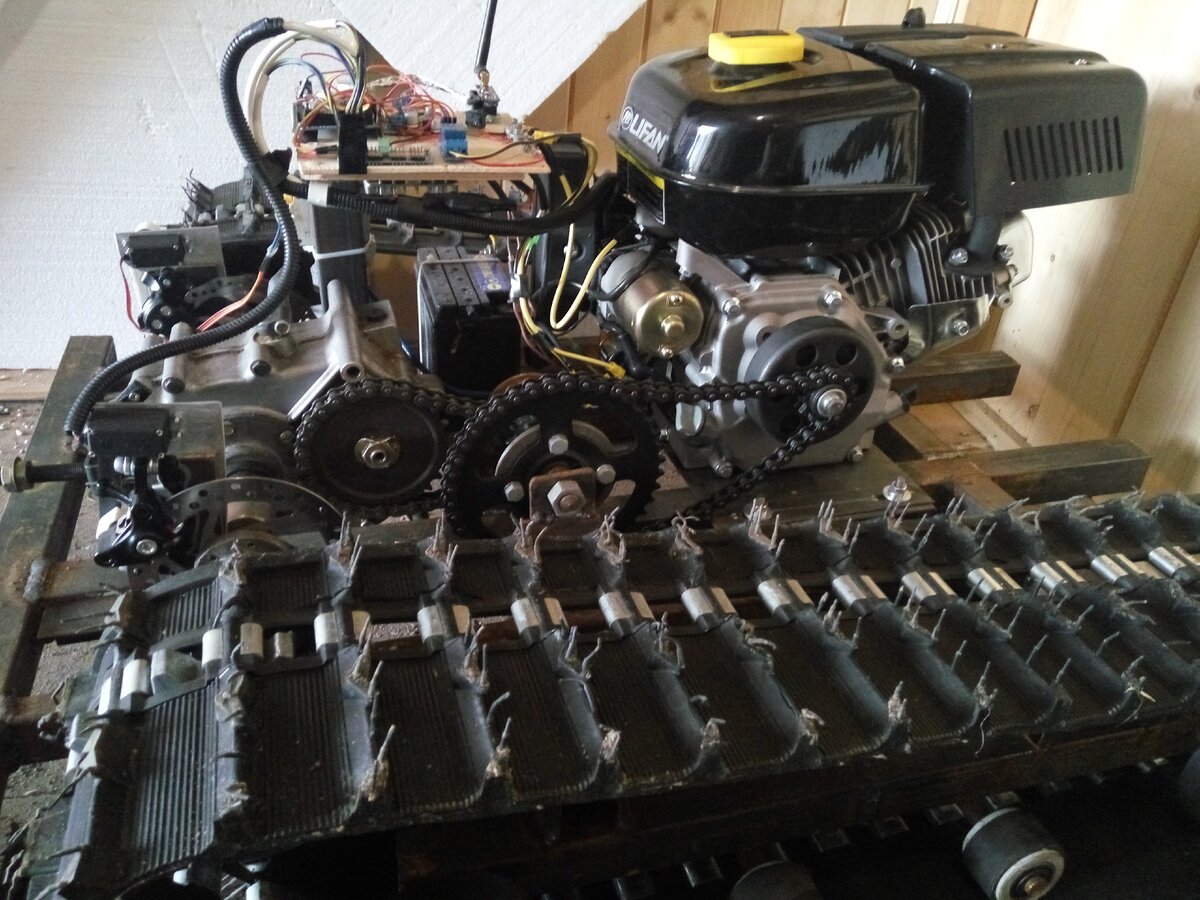
1. Двигатель LIFAN 168F-2D (6.5 л.с.) с электростартером. На тот момент это было лучшее соотношение цены и мощности двигателя.
2. Редуктор мотороллера Муравей (дифференциал, реверс), потому что он был в наличии.
3. Велосипедные дисковые тормоза (для бортовых поворотов). Конструировать настоящие фрикционы - это дорогое удовольствие, и не в рамках домашней мастерской. Как многие знают дисковые тормоза отличаются своей эффективностью, а велосипедные своей простотой и ценой.
4. Контроллер Arduino Mega2560, много выводов управления.
5. Аппаратура на базе Arduino Pro mini+Nrf24l01 - были все компоненты для постройки аппаратуры и опыт постройки беспроводных устройств на базе данного радио модуля.
6. Сервоприводы MG996R для управления заслонками и DS3218 для управления бортовыми тормозами.
7. Генератор Ваз - 2105 для заряда аккумулятора и питания потребителей.
Пришлось полностью переработать раму платформы для этого была выбрана профильная труба 40*40 мм.
Гусеничная тележка
Ролики гусеничной тележки: большие были напечатаны на 3D принтере, но после первых испытаний показали себя не с лучшей стороны, поэтому были заменены на цельнолитые из алюминия, маленькие выточенные из полипропиленовой трубы, были обрезинены для лучшего вращения.

Для передачи крутящего момента от двигателя на редуктор от муравья, использовалось центробежное сцепление и цепной понижающий редуктор.
Система поворота
Для осуществления поворачивания платформы была использована следующая схема: редуктор мотороллера Муравей уже имеет полноценный дифференциал, поэтому для поворота достаточно притормозить одну из полуосей.
Использование дисковых тормозов от велосипеда показало, что их тормозных усилий достаточно для наших целей.
Диск закрепил на полуоси, тормозной суппорт был закреплен к раме, на кронштейне суппорта также расположился сервопривод. Получилась довольно компактная и функциональная конструкция.
Электроника
Первая версия контроллера содержала следующие компоненты:
• Arduino Mega 2560
• Monster Moto Shield (30 амперный драйвер управления коллекторным двигателем) - очень интересная плата расширения для Arduino, драйвер содержит защиту по току, умеет мерять ток нагрузки.
• 16-ти канальный ШИМ контроллер - для подключения сервоприводов.
• преобразователь напряжения из 12 вольт в 5 вольт
• радиомодуль nrf24l01
Вся электроника была установлена в железный бокс (для снижения воздействия различных помех на электронные компоненты)
Первые шаги
Спустя продолжительное время было проведено много работы по настройке всех компонентов. Первые испытания дали свои плоды.
Продолжение следует
Если понравилась статья ставь палец вверх и подписывайся на мой канал KulibinLab