О схематизации связей в расчётных системах в общем можно прочитать здесь:
Свободное пространственное тело имеет шесть степеней свободы перемещений – возможность поступательных движений по трем направлениям вдоль трех взаимно перпендикулярных осей и трех вращательных движений вокруг тех же осей.
Положение любой точки в пространстве может быть определено тремя координатами (три степени свободы), на плоскости - двумя координатами (две степени свободы).
Виды наиболее часто встречающихся простых связей пространственных систем
а) Шаровой шарнир:
Кинематическая характеристика:
Такая связь препятствует поступательным перемещениям соединяемых тел относительно друг друга в трех взаимноперпендикулярных направлениях и допускает взаимный поворот в любых направлениях.
б) Простая линейная (плоскоподвижная) шаровая связь - стержень с шаровыми шарнирами по концам
Большинство остальных видов пространственных связей являются различными комбинациями нескольких простых линейных связей.
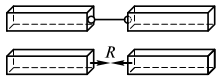
Кинематическая характеристика:
Такая связь препятствует взаимному поступательному перемещению соединяемых тел по направлению оси связи, но допускает поступательные перемещения в двух плоскостях, перпендикулярных к оси стержня, и повороты вокруг трех взаимно перпендикулярных осей.
Следовательно, такая связь уничтожает одну степень свободы соединяемых тел.
в) Линейно-подвижная шаровая связь - два стержня с общим шаровым шарниром
Кинематическая характеристика:
Такая связь препятствует взаимным поступательным перемещениям соединяемых тел в плоскости двух стержней, но допускает поступательное перемещение в направлении, перпендикулярному этой плоскости и повороты вокруг трех взаимно перпендикулярных осей.
Следовательно, такая связь уничтожает две степени свободы соединяемых тел.
г) Неподвижная шаровая связь - три стержня не лежащих в одной плоскости и имеющих общий шаровой шарнир
Кинематическая характеристика:
Такая связь препятствует взаимным поступательным перемещениям соединяемых тел в трех взаимно-перпендикулярных направлениях, но допускает взаимный поворот в любых направлениях.
Следовательно, такая связь уничтожает три степени свободы соединяемых тел и эквивалентна шаровому шарниру.
д) Плоскоподвижная связь с одним поворотом - три параллельных стержня, не лежащих в одной плоскости
Кинематическая характеристика:
Такая связь препятствует взаимным поступательным перемещениям соединяемых тел вдоль осей стержней и двум поворотам в плоскостях, в которых попарно лежат стержни, но допускает поступательное перемещение в плоскости, перпендикулярной стержням.
Следовательно, такая связь уничтожает три степени свободы соединяемых тел.
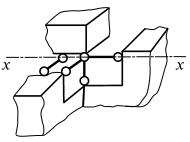
е) Линейно-подвижная связь с двумя поворотами - три стержня в одной плоскости, два из которых параллельны, а третий имеет с одним из них общий шаровой шарнир
Кинематическая характеристика:
Такая связь препятствует взаимным поступательным перемещениям соединяемых тел и повороту в плоскости стержней, но допускает поступательное перемещение по прямой, перпендикулярной плоскости стержней и два поворота.
Следовательно, такая связь уничтожает три степени свободы соединяемых тел.
ж) Жесткое соединение
Кинематическая характеристика:
Такая связь препятствует всем взаимным смещениям соединяемых тел.
Следовательно, такая связь уничтожает все шесть степеней свободы соединяемых тел.
Пример образования более сложных связей путем добавления к простым связям дополнительных соединительных стержней
Цилиндрический шарнир - Связь, получаемая путем добавления к неподвижной шаровой связи двух стержней, препятствующих поворотам вокруг двух осей.
Кинематическая характеристика:
Такая связь допускает поворот только вокруг оси, проходящей через шаровые шарниры по концам пяти стержней.
👷♂️ Если есть что добавить - пишите 🙂