![Крошечный робот может двигаться по сосудам для доставки лекарств [ВИДЕО]](https://avatars.dzeninfra.ru/get-zen_doc/1596193/pub_65107bf8a542ea57a9342849_65107bffa542ea57a9342a72/scale_1200)
Инженеры из Германии и Швейцарии сконструировали спиралевидного микроробота с акустическим управлением. Он улавливает колебания окружающего звукового поля и преобразует их в движение, что исключает необходимость в отдельном источнике питания.
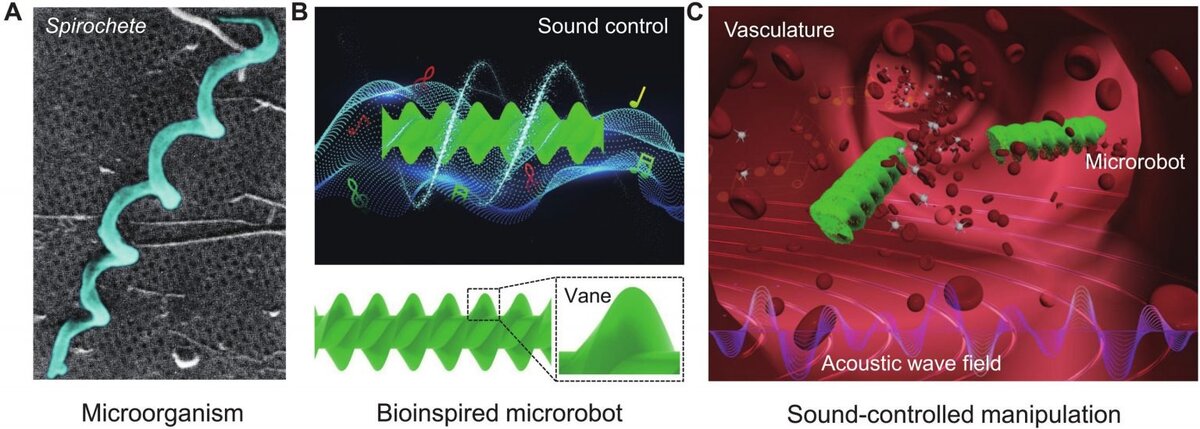
Учёные проектировали устройство с оглядкой на спирохет — клетки этих микроорганизмов закручены в форме спирали, и вращаясь в вязкой жидкости, они совершают поступательные движения. Исследователи напечатали на 3D-принтере кусочек нетоксичного полимера в форме штопора длиной 350 мкм и диаметром 100 мкм, затем поместили его в стеклянную трубку, наполненную водой. Под воздействием внешнего акустического поля молекулы жидкости вибрировали, создавая вихрь, который толкал робота вперёд.
На этом примере учёные показали, как можно управлять такими роботами, изменяя свойства звуковых волн. Бот реагировал на звуковые стимулы частотой от 12 до 19 кГц, а если они увеличивали частоту колебаний, он двигался вверх по трубе, наклонённой под углом 45°.
Технологию можно адаптировать для доставки лекарств по кровеносным сосудам и проведения неинвазивных операций.