Статья кратко знакомит читателей с бесколлекторными двигателями постоянного тока, представляет продукты и информацию о швейцарской группе компаний maxon (до июля 2019 года – maxon motors). Статья выполнена на основе материалов с сайта компании и ее последнего каталога, переведенного компанией ООО «ИнноДрайв», которая с 1 июня 2019 года представляет интересы швейцарской группы и является официальным представителем maxon в Российской Федерации.
Бесколлекторные двигатели постоянного тока (Brushless DC Motors, BLDC), которые также называют вентильными, конструктивно состоят из ротора с постоянными магнитами и статора с обмотками. Двигатели этого типа являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. В известной степени они похожи на шаговые двигатели, но принцип их работы иной, и по ряду параметров, особенно по скорости, они значительно превосходят двигатели этого типа. Роднит их наличие ротора в виде постоянных магнитов и использование электронной коммутации для управления статором. Преимущество же синхронного двигателя в том, что его скорость вращения до критической, предельной нагрузки, от нее не зависит.
Бесколлекторные двигатели постоянного тока отличаются превосходными характеристиками крутящего момента, высокой мощностью, чрезвычайно широким диапазоном скоростей и, благодаря отсутствию коллектора со щетками, исключительно длительным сроком службы. Еще одной характерной чертой бесколлекторных двигателей являются малые электромагнитные помехи (ЭМП). Они практически не создают радиопомех, что решает непростые проблемы электромагнитной совместимости и позволяет использовать их совместно с чувствительным к сторонним помехам оборудованием. Конструкция бесколлекторного двигателя позволяет эксплуатировать его в воде и агрессивных средах, а возможность стерилизации открывает путь к использованию в медицинской промышленности.
Особенности бесколлекторных двигателей постоянного тока maxon
Особенностью бесколлекторных двигателей постоянного тока является способ определения положения ротора двигателя. Для этого существует два варианта решения: либо с помощью датчиков положения, либо путем измерения напряжения на незадействованной в данный момент времени обмотке. Датчики положения могут быть оптические, индуктивные, магнитные и т. д. В настоящее время чаще всего используются датчики на основе эффекта Холла (рис. 1), их число равно числу фаз. Благодаря датчикам электронный блок управления всегда «знает», в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени.
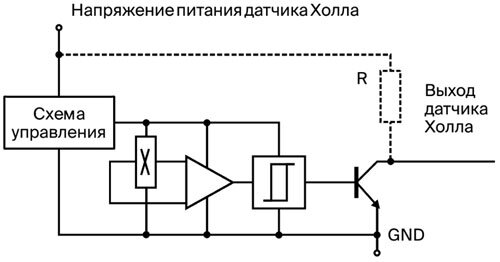
Рис. 1. Схема датчика Холла: потребление тока датчика составляет примерно 4 мA (на выходе – высокий уровень), резистор R, как правило, внешний, используется в качестве подтяжки
Двигатели с датчиками положения предпочтительней с технической точки зрения. Алгоритм управления такими двигателями значительно проще, но конструктивное решение двигателя – сложнее, так как требуется установить датчики и подать к ним питание.
Если по условиям работы датчики Холла не требуются, то используется решение без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками, кроме того, что их выводы – это только цепи подключения обмоток. А вот схема управления в этом случае получается сложной и, как правило, не универсальной: выполняется под конкретную модель двигателя, а иногда даже под режим его функционирования.
Если говорить кратко, то в случае, если двигатель стартует под нагрузкой, применяют двигатели с датчиками. Если двигатель стартует без нагрузки на валу, можно применять двигатели без датчиков. Двигатель без датчиков положения должен стартовать без нагрузки на валу. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для конечного приложения, то необходимо применять двигатели с датчиками. Не менее важный вопрос – это минимальная скорость, которую можно обеспечить с датчиками Холла или для бездатчикового двигателя. Управление по датчикам Холла позволяет достичь более низких скоростей, чем бездатчиковое управление, хотя и не таких низких, как управление с обратной связью по датчику положения.
Еще один важный момент – это режим коммутации обмоток двигателя. Коммутация может быть ступенчатая или синусоидальная.
При синусоидальной коммутации для получения с помощью электроники синусоидального тока в обмотках двигателя используются датчики положения высокого разрешения. Токи, протекающие через три обмотки двигателя, зависят от положения ротора и сдвинуты в каждой фазе на 120° (синусоидальная коммутация). Это приводит к плавному и точному движению и, как следствие, к высокому качеству управления движением.
Особенности синусоидальной коммутации: требует применения более дорогой электроники, отсутствие пульсаций момента, плавное движение даже на низких скоростях, способность развивать момент примерно на 5 % больший, чем при ступенчатой коммутации. Этот тип коммутации применяется для высокодинамичных сервоприводов и при решении задач позиционирования.
Ступенчатая, или блочная, коммутация может быть реализована как в двигателях с датчиками Холла, так и без них. В первом случае положение ротора определятся тремя встроенными датчиками Холла. Расположение датчиков Холла с шагом 120° обеспечивает шесть различных комбинаций переключения на один оборот. Три секции обмотки в соответствии с информацией от датчиков подключаются в шести различных состояниях коммутации. Кривые тока и напряжения имеют ступенчатый вид. Для получения максимального момента момент переключения каждой фазы смещен на 30°.
Особенности ступенчатой коммутации: электроника относительно простая и привлекательная по цене, пульсация момента составляет примерно 14 %, управляемый пуск двигателя, возможность высоких значений пускового тока и ускорения. Этот тип коммутации находит применение в сервоприводах, при работе в старт-стоповых режимах и при решении определенных задач позиционирования. При выборе двигателей необходимо помнить, что данные в спецификациях на бесколлекторные двигатели постоянного тока maxon указаны для изделий именно со ступенчатой коммутацией.
Если используется ступенчатая коммутация без датчиков положения, то положение ротора определяется по изменению индуцируемого в обмотке напряжения (ЭДС). Электроника платы управления выделяет момент перехода ЭДС через нуль и коммутирует ток двигателя через интервал, зависящий от скорости вращения вала (30° электрических после прохождения ЭДС через нуль). Амплитуда индуцируемой ЭДС зависит от скорости. При неподвижном роторе или низкой скорости этот сигнал слишком мал, и пересечение нулевой отметки не может быть точно определено. Поэтому для пуска в ход требуются специальные алгоритмы (сходные с управлением шаговым двигателем). Чтобы обеспечить коммутацию бесколлекторных двигателей постоянного тока без применения датчиков, обычно с помощью электроники создается искусственная нулевая точка.
Особенности бездатчиковой ступенчатой коммутации: пульсация момента около 14 %, неопределенный момент пуска, неприменимость для работы на низких скоростях и для высокодинамичных приложений, такой двигатель преимущественно используется для длительной работы на высоких скоростях. Пояснение изложенных выше принципов коммутации показано на рис. 2.
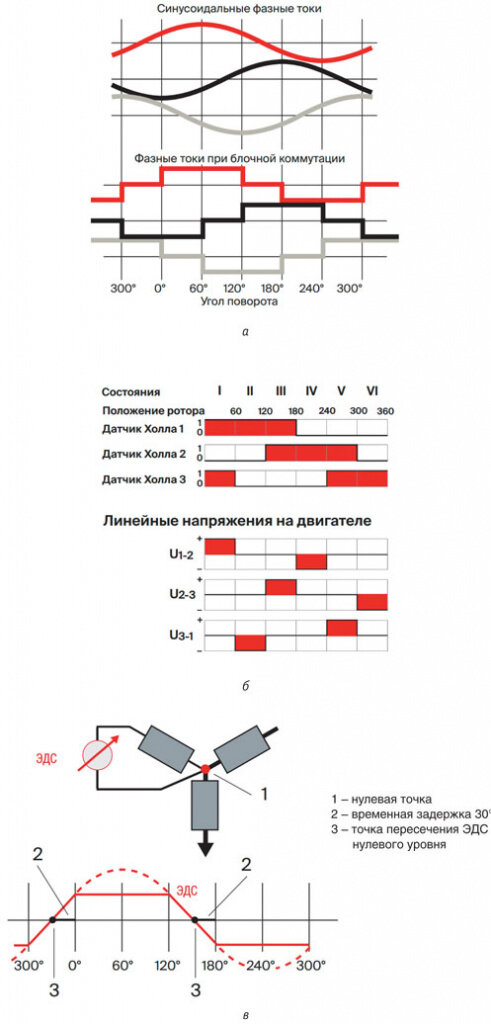
Рис. 2. Варианты коммутации обмоток бесколлекторных двигателей постоянного тока maxon: а – формы токов при различных видах коммутации; б – временная диаграмма ступенчатой коммутации при использовании датчиков Холла; в – временная диаграмма ступенчатой коммутации без использования датчиков
Что касается организации обмоток, то ромбическая фирменная обмотка статора двигателей maxon разделена на три секции, магнитные оси которых смещены на 120°. Секции обмотки могут быть соединены двумя различными способами – «звездой» (Y‑схема) или «треугольником» (Δ-схема) (рис. 3).
Рис. 3. Схемы включения обмоток бесколлекторных двигателей постоянного тока maxon «звездой» и «треугольником»
Конструктивные особенности бесколлекторных двигателей постоянного тока maxon
В настоящий момент maxon предлагает бесколлекторные двигатели постоянного тока с обмоткой без стального сердечника (рис. 4) и со стальным сердечником (рис. 5). Среди последних представлены двигатели с внутренним ротором (EC-i) и с внешним ротором (EC flat, EC frameless flat). Такое разнообразие удовлетворит любые требования клиентов компании как по области применения, так и по мощности, и по конструктивному исполнению.
Рис. 4. Общая конструкция бесколлекторного двигателя постоянного тока maxon с обмоткой без стального сердечника
Рис. 5. Общая конструкция бесколлекторного двигателя постоянного тока maxon с обмоткой со стальным сердечником: слева – двигатель серии EC-i со стальным сердечником и внутренним ротором; справа – двигатель серии EC flat со стальным сердечником и внешним ротором
Возможные применения бесколлекторных двигателей постоянного тока maxon:
- высокодинамичные сервоприводы;
- работа в старт-стоповых режимах;
- задачи позиционирования.
Характеристики и особенности бесколлекторных двигателей постоянного тока maxon с обмоткой без стального сердечника серий ECX Speed, ECX SQUARE, ECX TORQUE, EC, EC-max и EC‑4pole:
- длительный срок службы;
- высокий КПД;
- линейные характеристики двигателя, превосходная управляемость;
- обмотка без стального сердечника, выполненная по фирменной технологии system maxon, с тремя фазами на статоре;
- самая низкая электрическая постоянная времени и низкая индуктивность;
- отсутствие магнитной фиксации;
- хорошая теплоотдача, высокая перегрузочная способность;
- вращающиеся неодимовые постоянные магниты с одной или двумя парами полюсов;
- доступны исполнения: с датчиками Холла, без датчиков и со встроенной электроникой;
- имеются варианты, выдерживающие многократную стерилизацию и предназначенные для жестких условий эксплуатации.
Характеристики и особенности бесколлекторных двигателей постоянного тока maxon с обмоткой со стальным сердечником серий EC-i, EC flat и плоских бескорпусных EC frameless flat, поставляемых в виде комплекта ротор-статор:
- длительный срок службы;
- скорости до 15 000 об/мин;
- относительно высокий момент инерции;
- характеристики двигателей могут отличаться от строго линейных;
- для простого управления скоростью и положением используются сигналы от датчиков Холла;
- обмотка со стальным сердечником и несколькими зубцами на фазу на статоре;
- низкий момент магнитной фиксации;
- хорошая теплоотдача, высокая перегрузочная способность;
- многополюсные неодимовые постоянные магниты;
- меньшие коммутационные перепады;
- доступны исполнения: с датчиками Холла и без датчиков, а также со встроенной электроникой.
Коммерчески доступные серии бесколлекторных двигателей постоянного тока maxon: таблица 1, таблица 2
Статья опубликована в журнале «ИСУП»