В этой статье представлен избыточный скелетно-мышечный робот с тонкими мышцами Мак-Киббена, основанный на анатомии человека. Целью этого робота является достижение движений и характеристик, очень похожих на человеческое тело.
Мы используем тонкую мышцу Мак-Киббена, податливую и гибкую, в качестве привода скелетно-мышечного робота. Используя пучок тонких мышц Мак-Киббена, мы развиваем мультифиламентные мышцу, которая имеет характеристики, подобные человеческим мышцам. Напротив, приводы обычных скелетно-мышечных роботов очень тяжелые, неплотно прикреплены и имеют плохую обратную управляемость.
Поскольку мультифиламентные мышцы легкие и могут плотно прикрепляться, мы можем прикрепить их к скелетно-мышечному роботу как скелетную мышцу и создать избыточную систему, эквивалентную человеческому приводному механизму. В этой статье мы сообщаем о методе изготовления мультифиламентные мышц, имитирующих различные мышцы, о разработке механизма мышц нижних конечностей для избыточного скелетно-мышечного робота с тонкими мышцами Мак-Киббена и экспериментальных результатах, показывающих, что предложенный скелетно-мышечный робот выполняет человеческие движения, которые не еще не сообщалось для других роботов.
Фон
В настоящее время во всем мире активно ведутся исследования человекоподобных роботов, имитирующих человеческие приводные механизмы. Наша исследовательская группа считает, что мы можем достичь человеческого поведения, идеально имитируя человеческие механизмы и структуру, используя расположение мышц, избыточность и системы, управляемые сухожилиями. Под «человекоподобными» подразумеваются особые механизмы, которых нет у обычных роботов, но есть у человека.
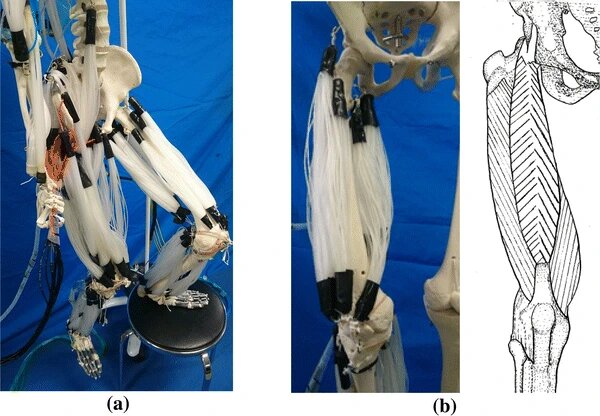
Эти механизмы делают нашего робота более похожим на человека, чем другие роботы. Есть движения, которые достигаются путем идеальной имитации движений человека, например, вращение колена, возникающее только при сгибании колена, или сложное сгибающее движение лодыжки с множеством степеней свободы. Между современными роботами и человеческими телами существует множество кинематических различий.
Например, (1) колени роботов обычно состоят из шарнирного соединения с фиксированной осью вращения, в то время как колени человека состоят из шарнирного соединения со смещающейся осью вращения; (2) колени роботов обычно имеют одну степень свободы, которая поддерживает сгибание, в то время как человеческие колени имеют две степени свободы в положении сгибания, которые поддерживают сгибание и вращение; и (3) роботизированные лодыжки обычно состоят из шарового шарнира и недеформируемой стопы, в то время как человеческие лодыжки состоят из внешних мышц, которые не только поддерживают движение лодыжки, но и деформируют стопу до изогнутой формы с инверсией и выворачиванием.
Эти функциональные различия между современными роботами и человеческими телами также приводят к различиям в характеристиках и внешнем виде.
Конечной целью этого исследования было дальнейшее развитие человекоподобных роботов с человеческими характеристиками путем имитации механизма движения человека, включая количество и расположение мышц в человеческом теле. Человеческие характеристики, такие как деформируемая стопа, играют важную роль при ходьбе, а вращение колена при сгибании способствует управлению педалями автомобиля.
Воспользовавшись такими человеческими характеристиками, наш робот может быть использован для проверки гипотез, связанных с движением человека, а также для сравнения производительности робота с производительностью человека и работы в реальном мире, например, в качестве интерактивных роботов-людей, развлекательных роботов. и медицинских обучающих роботов в будущем. Помня об этой цели, в этой статье описываются усилия по проверке потенциала человекоподобных роботизированных механизмов путем создания аналогичного приводного механизма с использованием наших уникальных тонких мышц.
Скелетно-мышечные роботы с системами, управляемыми сухожилиями, в основном с использованием двигателей, могут лучше имитировать движения и характеристики человека, чем роботы с другими приводными механизмами.
Кенширо [1, 2] приводится в движение моторами и сухожилиями. Тело Кенширо похоже на человеческое, потому что его мышцы, кости и структуры суставов основаны на человеческой анатомии. Например, его коленный сустав имитирует человеческий; таким образом, Kenshiro имеет функциональность коленной чашечки, крестообразной связки и механизма винтового соединения в коленном суставе с использованием механики звеньев, что позволяет совершать движения, подобные человеческим.
ECCEROBOT (Embodied Cognition in a Compliantly Engineered Robot) [3, 4] также управляется системой, управляемой сухожилиями. Он состоит из скелета, сделанного из полиморфа, похожего на кость, и эластичных приводов, которые включают моторы и эластичные сухожилия для реализации движений, подобных человеческим. ECCEROBOT используется для проверки гипотез о движении человека, а также для сравнения его производительности с человеческими. Однако приводы этих обычных скелетно-мышечных роботов с моторизованными сухожильными механизмами очень тяжелые, неплотно прикреплены к телу.