вязко - скользящий привод - типичный метод, основанный на теории трения. трение - это основная диссипативная сила, которая присутствует во всех относительно скользящих машинах и структурах. в прошлом исследования институтов вязкого скольжения были сосредоточены только на том, как избежать неустойчивости и потерь от трения в высокоточных сервосистемы. из - за внешнего вида пьезоэлектрического материала и хорошей ответной характеристики, принцип прилипания и скольжения применяется в работе драйвера. сущность привода вязкого скольжения состоит в том, чтобы управлять движущимся предметом и производить смещение, используя разницу между максимальным статическим трением и трением скольжения.
ускорение, вызванное скоростной деформацией пьезоэлектрической керамики на основе пьезоэлектрической керамики, то есть инерционным ударом, не позволяет динамическим трениям обеспечивать ускорение движущихся объектов, сохраняя тем самым первоначальное положение, а затем управляя пьезоэлектрической керамикой PZT до меньшего значения. восстановление скорости для достижения статического трения, перемещения и микросдвига тела, так называемые инерциально вязко - скользящий привод.
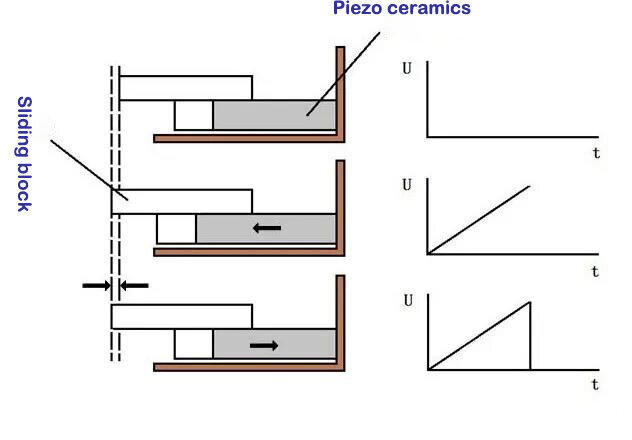
принцип сцепления и скольжения
Как показано на рисунке 1. рабочий процесс в принципе можно разделить на три этапа: начальная стадия, в отсутствие приводного сигнала напряжения, пьезокерамика и подвижные ползунки остаются неподвижными; Второй этап, с наступлением медленно поднимающихся электрических сигналов, пьезоэлектрический керамика и ползунок перемещаются вместе, то есть стадия вязкости. при этом статическое трение используется в качестве движущей силы, два "сцепления" перемещаются вместе; на третьем этапе сигнал напряжения быстро падает. из - за высокой чувствительности пьезоэлектрической керамики происходит быстрое сужение. из - за существования инерциальной силы, т.е. силы трения не могут обеспечить большую ускоряющую силу, ползун не будет своевременно передвигаться с пьезоэлектрической керамикой, ползунки и пьезокерамика будут относительно скользить друг к другу, чтобы сохранить исходное положение. Это скользящая стадия. повторение этого цикла позволит ползунку непрерывно двигаться вперед. для обратного перемещения используйте режим напряжения обратного привода.
вязкий скользящий диск, по сути, использует трение как источник, чтобы достичь микродвижения движущегося объекта. механизм пьезоэлектрического и точного движения, использующий эффект вязкости и скольжения, управляется нажатием электрокерамики на движение, стимулируемое пилообразным напряжением, и трением покоя. Он может работать в двух режимах поступательного движения и статического сканирования, в режиме быстрого движения нелинейный эффект пьезоэлектрической керамики может быть проигнорирован. принцип вязко - скользящего привода легко реализовать, управление просто, с большим объемом движения, высокой разрешающей способностью, простой структурой, легко миниатюризировать и точно позиционировать. особые характеристики, связанные с электрокерамикой под давлением, были применены во многих приводах, основанных на этом принципе. наиболее распространенным из них является линейное движение и вращение приложений.
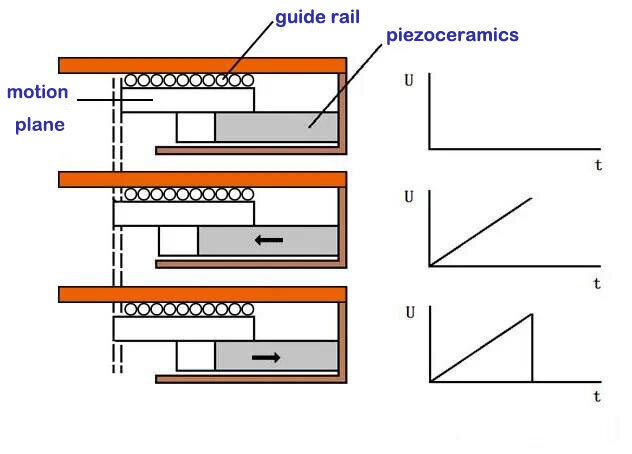
применять к линейным пьезоэлектрическим машинам
Линейные пьезоэлектрические двигатели с вязкостным скольжением обычно состоят из рельсов подшипников, подвижных поверхностей (т.е. подвижных узлов), фрикционных контактов и электрокерамических приводов, неподвижных на одном конце. пьезокерамика удлинена по мере увеличения напряжения привода. из - за трения между подвижными поверхностями и контактными точками подвижная поверхность перемещается вместе с пьезокерамической керамикой. когда пьезокерамика достигает максимума деформации, наложение быстро пониженного напряжения приводит к быстрому сжатию пьезокерамики в начальное состояние. Благодаря инерции, подвижная поверхность остается неподвижной, пьезокерамика возвращается в начальное состояние, так что возвратно - поступательный пьезоэлектрический мотор может осуществлять непрерывное линейное движение.
принцип линейного пьезоэлектрического двигателя
для линейных пьезоэлектрических двигателей CoreMorow применяется принцип электрозаклеивания под давлением. Ниже приводятся простые параметры нескольких продуктов.
серия линейных пьезоэлектрических машин N56
Параметры
прямой ход: 10, 20 или 30 мм
скорость перемещения: 5mm / s
грузоподъемность: 0.5kg
сохранение: 4.5 N
линейная пьезоэлектрическая машина серии N31
Параметры
прямой ход: 25, 50 или 100 мм
скорость движения: 10 мм / s
грузоподъемность: 5kg
поддерживающая сила: 40N
разрешение: < 0.1nm
кольцо датчика дополнительного растра
применить к пьезоэлектрическому винту (вращение)
двигатель со скользящим приводом для пьезоэлектрика также может быть настроен для производства вращательного движения. Хотя двигатель с электроприводом сцепления и скольжения не может непосредственно производить вращательное движение, но он может производить вращение через очень тонкий винт винта. в этом проекте зажим для двух концов силового пускателя пьезокерамической керамики соприкасается с винтом, заклинивает его по обеим сторонам и соединяет на расстоянии 180 °c. При быстром расширении и сжатии нажимного электрокерамического силового аппарата слесарное отверстие вращает винт для осуществления вращательного движения.
Этот принцип был принят линейным пьезоэлектрическим винтом CoreMorow, основные параметры которого изложены ниже.
N81 серии пьезоэлектрический винт
Параметры
линейный ход: 8, 13 или 26 мм
скорость перемещения: 3 мм / мин
нагрузка при линейном движении: 30N
минимальный линейный шаг
рамка регулирования электролинз
рамка настройки пьезоэлектрической линзы T25N81K8 основана на приводе двух линейных электрических болтов под давлением, которые имеют общую точку между двумя осями.
Параметры
диапазон регулирования: ±5°
степень свободы: тета х, тета y
диаметр, мм 25.4
Чувствительность: 0,7 мкрад