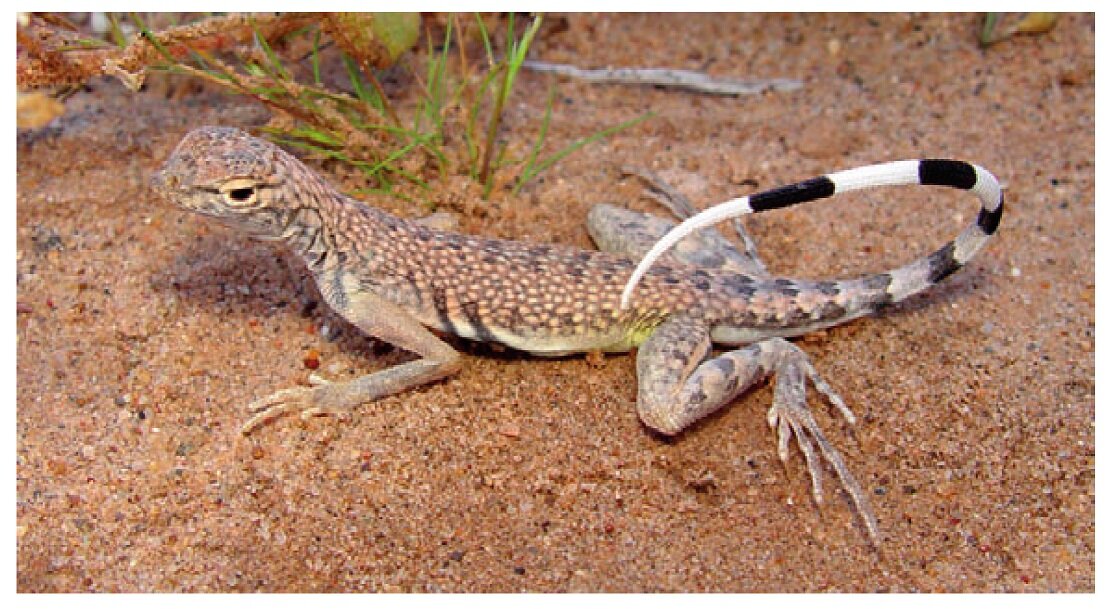
Исследователи из Нанкинского университета разработали нового робота, который может помочь в исследовании поверхности Марса. Робот имеет гибкую структуру тела, которая может воспроизводить движения пустынной ящерицы. Это хорошо подходит марсианских пустынь.
«Чтобы помочь амбициозным беспилотным миссиям на Марс, были разработаны разные типы роверов», — пишут исследователи из Нанкинского университета в своей работе. — «Но из-за того, что поверхность планеты состоит из зернистого грунта и камней разного размера, современные марсоходы двигаются по ней с трудом».
Биомиметический робот, созданный учеными, состоит из гибкой конструкции, напоминающей позвоночник, и четырех ног. Чтобы воспроизвести «ползание», типичное для ящериц, каждая "нога" имеет два шарнира и механизм, который вызывает качательное движение.
Каждый из тазобедренных суставов, соединяющих структуру позвоночника с ногами робота, состоит из двух сервоприводов и четырехрычажного механизма, который позволяет роботу подниматься, не теряя равновесия. «Ноги» робота имеют четыре гибких «пальца», состоящих из двух шарниров и когтя.
Исследователи пишут: «Стопа состоит из активной лодыжки и круглой подушечки с четырьмя гибкими пальцами, которые цепляются за почву и камни».
Чтобы воспроизвести движения ящериц, исследователи создали серию кинематических моделей для каждого из компонентов своего робота. Затем они использовали эти модели и числовые расчеты для планирования движений.
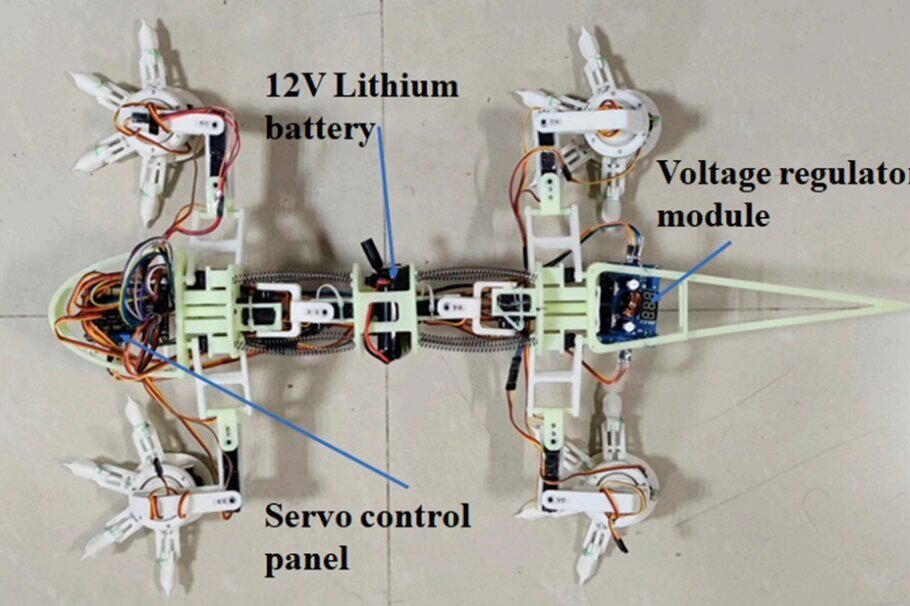
Ученые создали прототип своего робота, используя полимерные материалы, напечатанные на 3D-принтере, панель сервоуправления, литиевую батарею и другие электронные компоненты. Затем они использовали испытательный стенд, чтобы оценить движения своего робота-прототипа на каменистых поверхностях, которые напоминают местность на Марсе.
Эксперимент показал, что робот может эффективно двигаться в каменистой среде. Но прежде чем его можно будет протестировать за пределами лаборатории, команде еще необходимо добавить защитную герметизирующую оболочку, которая защитит робо-ящерицу от грязи и пыли.
Сейчас ученые работают над моделями машинного обучения, которые позволят роботу адаптировать движения к разным ландшафтам.