Этот одноногий робот, отдалённо напоминающий кузнечика, разработан в лаборатории биомиметики. Биомиметика, или бионика, - наука, которая учится подражать миру живой природы в лучших её проявлениях.
"Сальто" уже в 2016 году был способен выполнять сложные элементы, напоминающие трюки паркурщиков. К 2018 году разработчики из Университета Калифорнии в Беркли научили его самостоятельно запрыгивать на различные объекты, причём максимально точно и ровно.
Но, как ни странно, чего робот делать не умел, так это приземляться. Одно дело контролировать тело в движении, и совсем другое – попасть в нужную точку пространства и не упасть при "посадке", падая под самыми разными углами к поверхности и имея при этом только одну ногу.

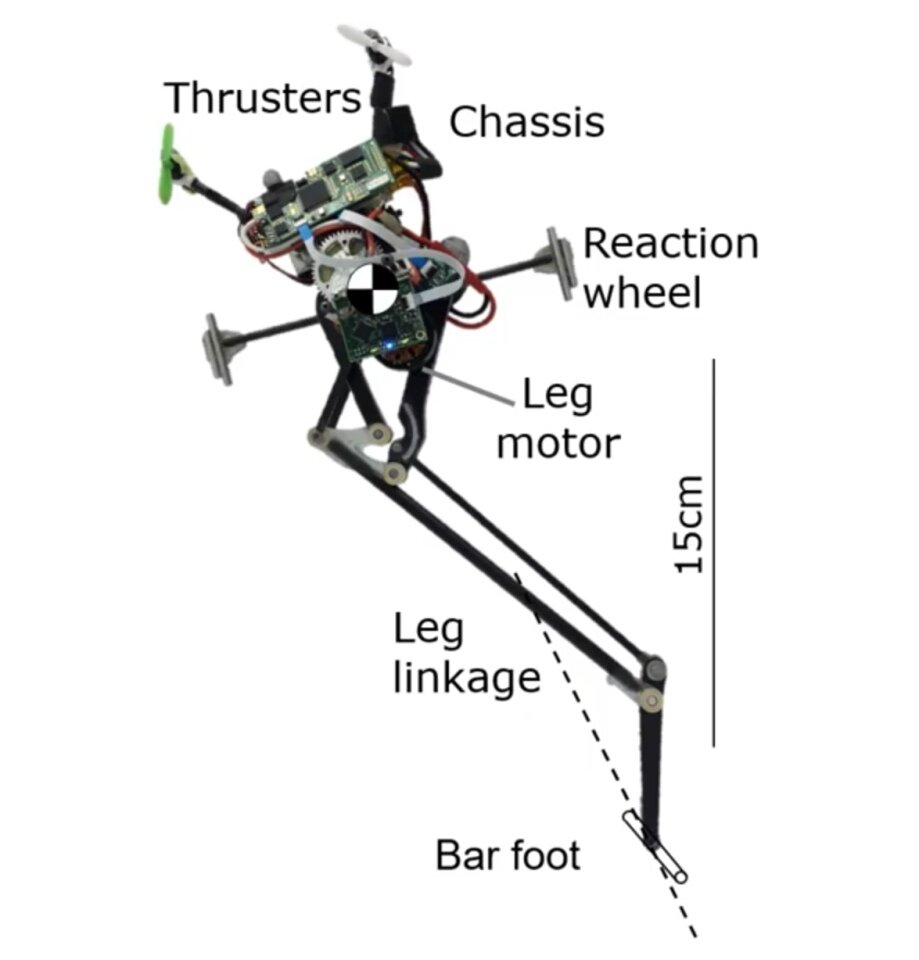
Но инженеры решили эту проблему, добавив в конструкцию маховик, который обеспечивает поддержание баланса.
Чтобы совершить прыжок из одной точки в другую, роботу необходимо прыгнуть под определённым углом, а в момент приземления выровняться. Поскольку конструкция не имеет рук, а нога только одна, маховик корректирует угол приземления робота в полёте и помогает ему выровняться после приземления.
Руководитель команды разработчиков Джастин Им (Justin Yim) отметил, что гимнасты сталкиваются с точно такой же проблемой при приземлении. Если у человека не получается подстроиться под нужный градус в полёте, то для баланса в момент приземления ему приходится делать шаг. Но у робота нет такой возможность, поскольку нога только одна. Человек также может использовать руки для поддержания баланса. Но и их у "Сальто" нет. Зато теперь отсутствие рук роботу компенсирует маховик.
Из 60 тестовых прыжков, робот смог ровно приземлиться в 52 случаях, в пяти - сел на "пятку", и всего в трёх упал и перевернулся.
Понравился материал? Тогда подписывайся на наш канал.
Чуть раньше мы рассказывали об российских автономных комбайнах, третьей роборуке (к слову, сильной и нежной) и роботах, помогающих на стройке.
Даёшь больше качественного контента! Сделаем Дзен лучше :)