Это четвертая часть повествования о том, как я делал подвижную модель СУ-152 в масштабе 1/35 на основе модели от MSD. Предыдущие части можно прочитать по ссылке.
Итак я остановился на том, что сделал вращающимися все катки, а также установил ведущие звездочки и электромоторы. Пришло время ответить на один из главных вопросов — а чем управляется модель?
Отвечаю — мозгом модели является китайская копия Ардуино Нано. Как по мне — оптимальный вариант для такого рода поделок, по крайне мере на первых этапах. Данный микроконтроллер прост в освоении, стоит недорого, имеет достаточно памяти и контактов-выводов для обеспечения работы систем модели.
На фотографиях ниже — все электронные модули, необходимые на данном этапе (в следующих частях добавится еще кое что, но все по порядку)
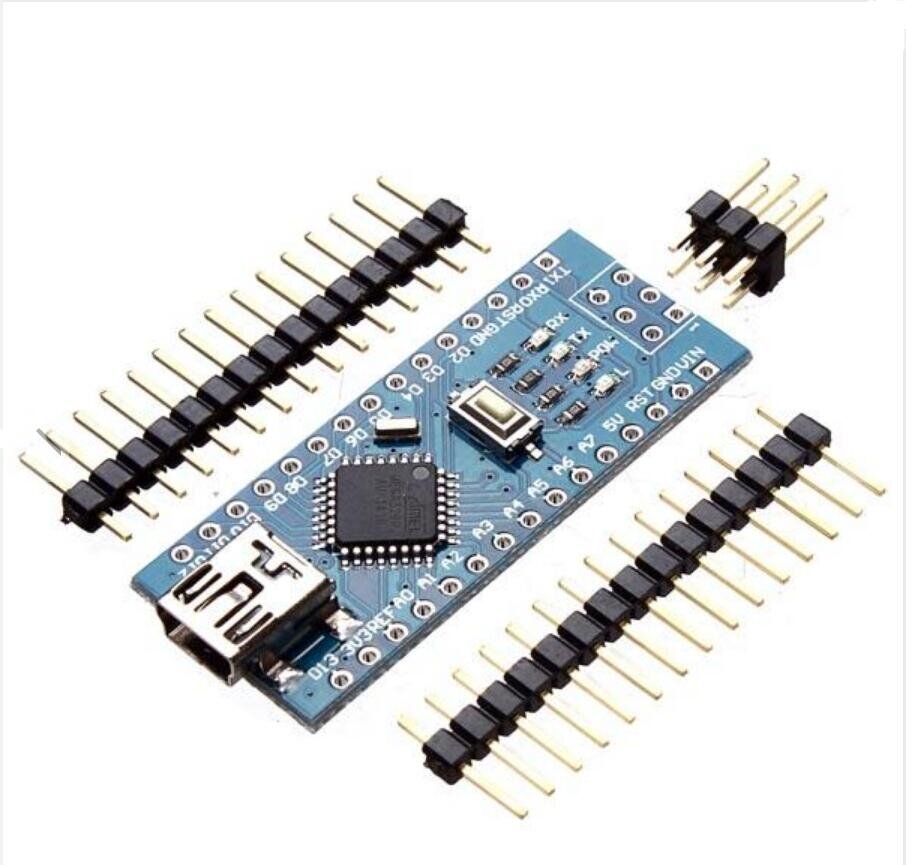

Ардуино — содержит в себе скетч (программу), которая указывает подключенным к Ардуино модулям, что им следует делать и как реагировать на входящие сигналы. Программу я написал сам, это доступно буквально любому.
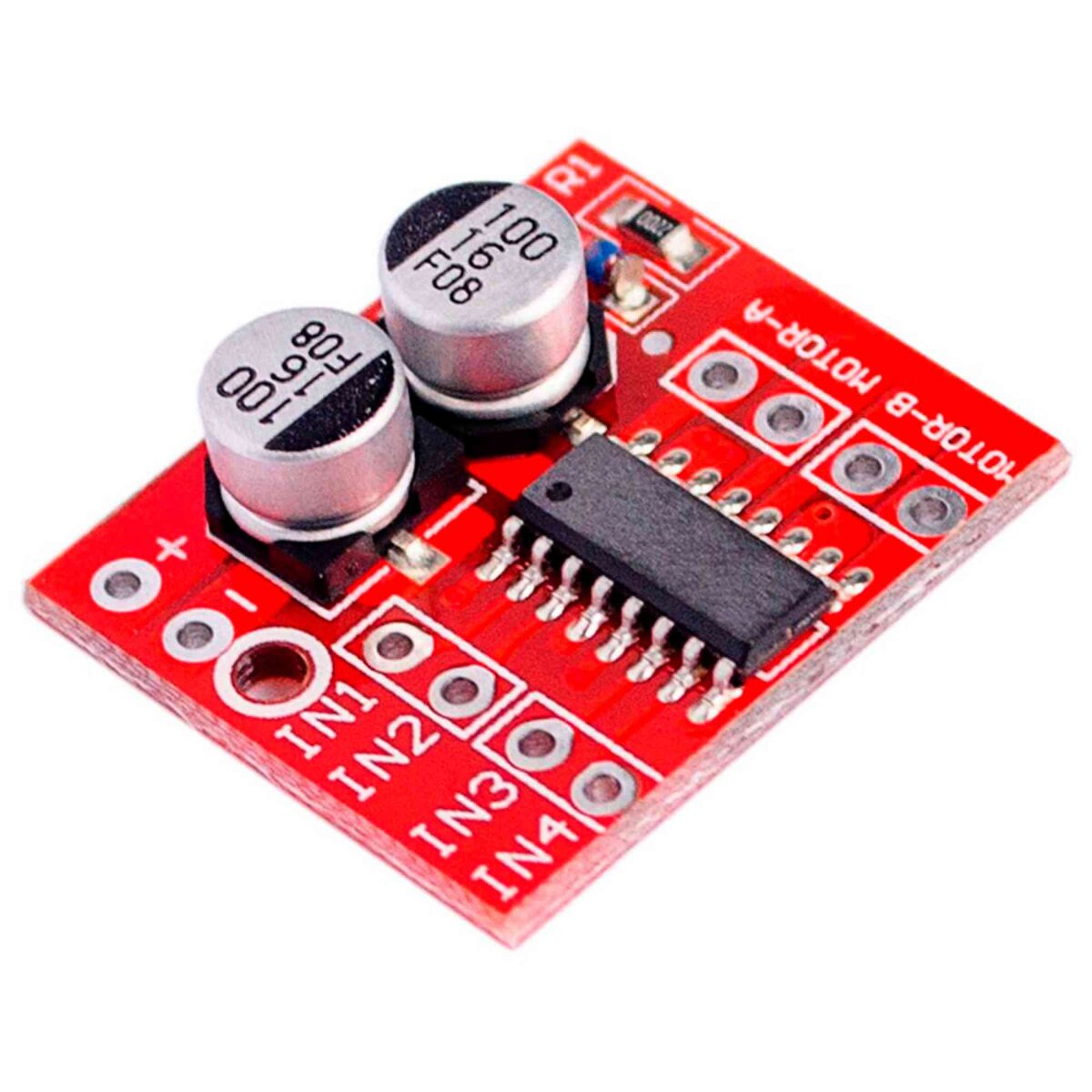
Драйвер MX 1508 — микросхема, необходимая для управления электромоторами. Дело в том, что сама Ардуино не способна провернуть мощный мотор, поэтому требуется специальный модуль. Существует много драйверов электромоторов, но мне по душе 1508.
NRF24L01+ — модуль радиосвязи на частоте 2.4 ГГц. Один из самых популярный модулей для Ардуино, позволяет делать дистанционные розетки, метеостанции, рации, да что угодно, где требуется отсутствие проводов и расстояние не превышает десятка метров (есть модуль с мощной антенной, там до километра-двух). Вот, в данном случае отлично справляется с радиоуправлением модели.
Стабилизатор AMS1117, необходим для понижения напряжения до 3.3В. Сама Ардуино хочет 5В, столько же необходимо моторам и драйверу двигателей (да и в целом модули Ардуино в основном на 5В). А вот NRF24L01+ вынь да положь 3.3В, иначе не заработает, а то и сгорит. В интернете есть специальный модуль-понижайка на 3.3 В для NRF24L01+, но он больше по размеру, и когда присоединен к NRF24L01+ занимает уж слишком много места.
Повышающий преобразователь MT3608 нужен для обеспечения всей схемы стабильными 5В. Питается модель от небольшого прямоугольного литиевого аккумулятора на 3.7 В. Можно также запитать от литиевой банки на 3.7 В или от 3 пальчиковых батарей (в теории даже от двух, но это уже «на тоненького»). В любом случае, указанная цифра 3.7 В является СРЕДНЕЙ. Полностью заряженный аккумулятор дает 4.2 В, разряженный 3-3.3 В. А микроконтроллеру нужно стабильно 5В. Вот для этого в схеме присутствует микросхема MT3608. Она имеет на выходе стабильное напряжение, то, которое вы выставите подстроечным резистором. Будь на входе 4В или 3.3В, на выходе будет стабильно 5В.
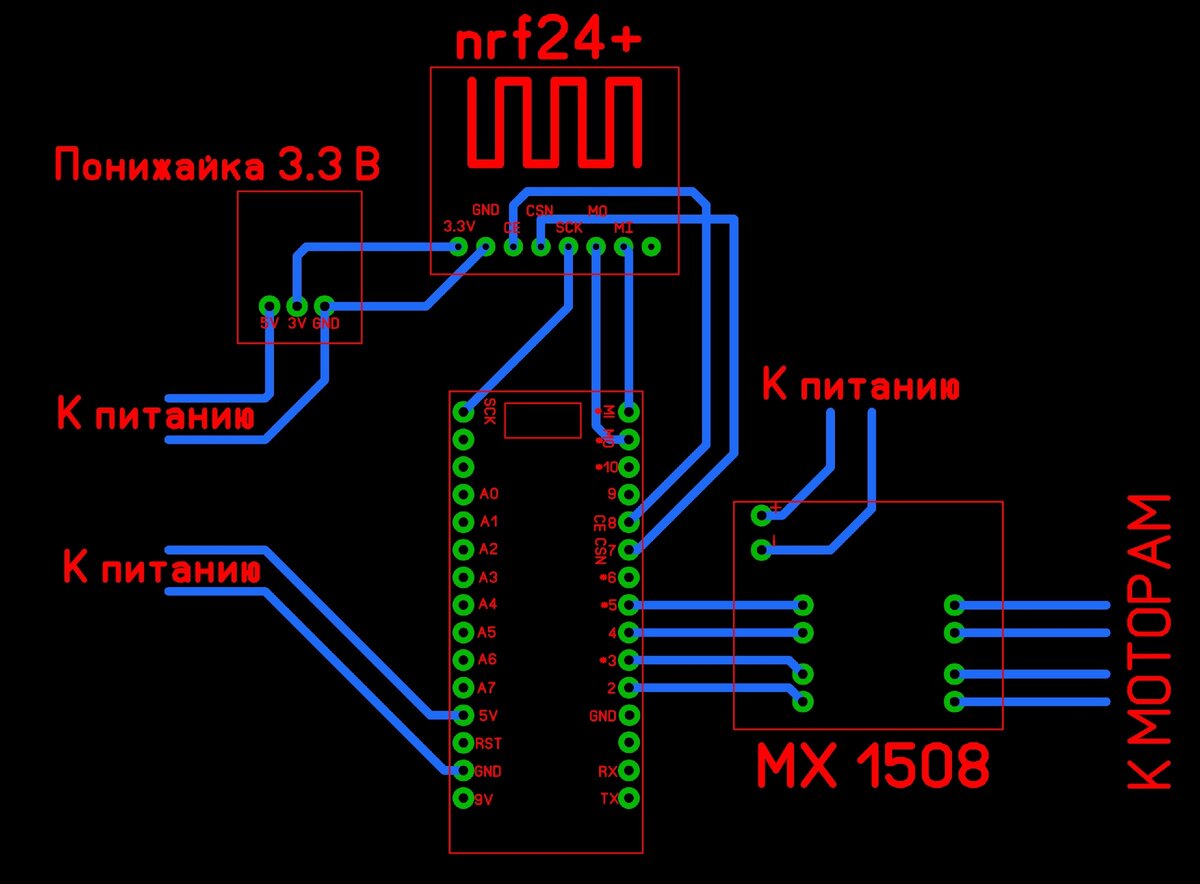
Пожалуй пора закругляться, но текст был бы не полным без двух вещей. Собственно РАЗ — схема соединения (да-да, не схема, а кошмар, автора расстрелять, но так уж нарисовал).
И собственно ДВА — модель впервые щупает гусеницами ландшафт, а точнее просто мой стол ))



















