Советским подводникам посвящается!
Ранее на канале уже было несколько статей по проектированию и боевой службе советской подводной лодки проект 661. Продолжим данные публикации еще одними воспоминаниями о тех днях, когда лодка была принята в состав советского флота, а заодно и оценим рацпредложения членов ее экипажа!
Итак, заложенную на стапели Северного машиностроительного предприятия 28 декабря 1963 года, в декабре 1968 года спустили на воду, а через год лодка вышла на заводские ходовые испытания и вскоре была передана флоту (приемный акт подписан 31 декабря 1969 года). Флот получил уникальную подводную лодку. Как мы помним, на государственных испытаниях она развила в подводном положении рекордную скорость в 42,4 узла (проектная подводная скорость - 38 – 39 узлов), и при этом оказалось, что паропроизводящая установка позволяла и дальше увеличивать ход. В период опытной эксплуатации в 1970-1971 годах после проведённых дополнительных расчетов разработчиком главного турбозубчатого агрегата (ГТЗА) было дано разрешение на проведение скоростных испытаний на форсированном режиме - на левой линии вала номинальные обороты были повышены на 4%, на правой - на 3%. На этом режиме подводная скорость достигла 44,7 узла, что является непревзойдённым по настоящего времени мировым рекордом подводной скорости боевой подводной лодки.

Особенности конструкции и использованные технические решения были в целом рассмотрены в ранее опубликованных на канале статьях (читать можно ЗДЕСЬ и ТУТ). Остановимся не некоторых частных особенностях подводной лодки, о которых в своих воспоминаниях рассказал один из членов ее первого экипажа, командир БЧ-4 – начальник РТС капитан-лейтенант В.Г.Сугробов (в последствии – капитан 1 ранга).
Одной из особенностей подводной лодки проекта 661 (на тот момент, так что не надо говорить – «да у нас сейчас так давно уже и везде…», время было другое)) была необычная компоновка центрального поста (ЦП). Он был расположен на верхней палубе четвертого отсека, и, в отличии от всех других подводных лодок того времени, был непроходной (проход из кормы в нос осуществлялся по средней палубе).
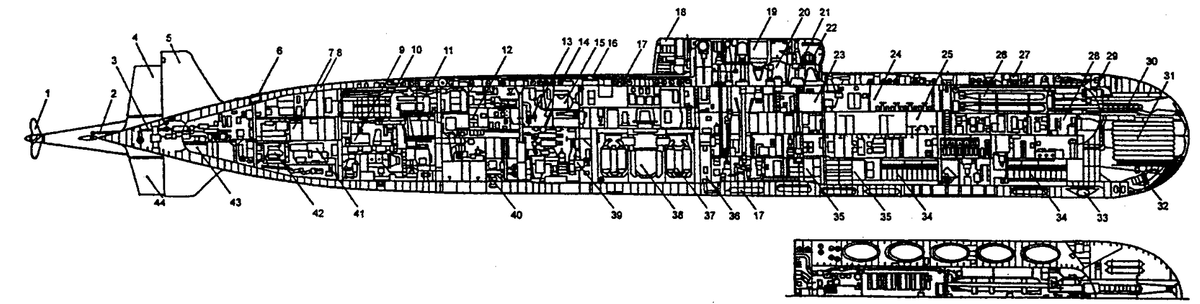
В носовой части ЦП у переборки третьего отсека располагались (думаю теперь это не представляет особого секрета) пульты систем «Турмалин-661» и «Шпат-661» (управление подводной лодкой по курсу и глубине), за которыми несли вахту рулевые - горизонтальщик и вертикальщик (по готовности № 2 – один человек).
По левому борту за пультом управление гидроакустическим комплексом «Рубин» и ГАС «Радиан-1» сидели два гидроакустика. По правому борту – пульт управления общекорабельными системами «Сигнал -661», за которым несли вахту вахтенный механик и вахтенный оператор – трюмный машинист. Отсюда шло управление всплытие и погружением, дифферентовкой и ходом подводной лодки, водоотливными средствами, системам воздуха высокого и среднего давления, подъемом выдвижных устройств, осуществлялась связь с вахтенными отсеков и других постов управления подводной лодки.
Посредине ЦП - универсальный перископ ПЗНС-9, к которому и рулевые, и гидроакустики, и операторы общекорабельных систем сидели спиной. В кормовой части ЦП за перегородками по левому борту находились штурманский пост и пульт управления радиолокационной станцией РЛК-101, по правому борту - пульты торпедного электрика (система «Ладога-661») и кресло командира.
Любопытно, что по мнению В.Г.Сугробова, место для командира подводной лодки было выбрано очень неудачно - перед ним была глухая переборка, закрывающая обзор основного оборудования ЦП поста и личного состава главного командного поста подводной лодки. Поэтому командир практически всегда располагался на раскладном стульчике в центре прохода перед перископом. Для вахтенного офицера место вообще предусмотрено не было, поэтому он располагался или на месте рулевого - вертикальщика (свободное по готовности № 2) или садился на стационарный магнитофон гидроакустиков, закрытый чехлом-сиденьем, изготовленным по нашей инициативе экипажа в период строительства!
Для заметок: Друзья, а по вашему опыту - где должен быть командир? "Впереди, на лихом коне?" или где то еще, хм, хотя "про коня" - это уже из другой сферы..., )
Как показал опыт плавания, по мнению В.Сугробова, такая компоновка ЦП, несмотря на недостатки, оказалась в целом удачной для управления подводной лодкой. Особенно важным (для командира БЧ-4, точно) оказалось отсутствие гидроакустической рубки – спорное заявление, как может показаться, однако тому было дано объяснение.
В.Г.Сугробов писал: «… поначалу я как начальник радиотехнической службы и член государственной комиссии по приёмке подводной лодки пытался принимать отчаянные усилия, чтобы после завершения опытной эксплуатации перенести пульты управления гидроакустическими средствами в отдельное помещение – гидроакустическую рубку. Постоянный шум в ЦП, доклады и команды, постоянное присутствие в ЦП большого количества посторонних людей делало условия работы гидроакустиков крайне затруднительным. Уже и с конструкторами ЦКБ-проектанта подводной лодки была достигнутая такая договоренность и было подыскано необходимое место на средней палубе (под ЦП)...»
Однако до таких переделок дело не дошло. Закончились государственные испытания, центральный пост покинули "лишние люди", экипаж освоился со своими обязанностями, большинство переговоров с ЦП обязали вести по корабельному телефону, и обстановка в ЦП резко изменилась. Оказалось, что нахождение гидроакустиков в составе ЦП, по существу, "увеличило поисковый потенциал и придало подводной лодке новые качества". Вот так вот - не больше не меньше.
Как объяснялось, мало того, что гидроакустики постоянно находились под контролем, но и командир подводной лодки всегда непосредственно видел обстановку на индикаторах гидроакустического комплекса, не отрываясь от обстановки в ЦП и управлении подводной лодки. В новом поколении гидроакустических средств визуальные каналы отображения информации стали существенно превосходить слуховые, но на серийных подводных лодках эти особенности использовались недостаточно эффективно.
Причина этому достаточна тривиальна. Обнаружив сигнал на визуальном индикаторе и доложив в ЦП, гидроакустик сразу же получал указание - «Классифицировать контакт!». А сделать это без использования слухового канала было очень проблематично. И чтобы "не вызывать раздражение ЦП", гидроакустики предпочитали докладывать, только разобравшись в характере цели. У нас же, как поясняет В.Г.Сугробов, увидев на индикаторе появившуюся отметку, акустик сразу докладывал о появлении цели. Иногда командир сам спрашивал вахтенного гидроакустика: «Что это?». Получив ответ - «Пока не слышно», командир командовал рулевому - «Двадцать градусов вправо по компасу!», и с началом циркуляции все отметки собственных шумов начинали дружно перемещаться по индикатору, оставаясь на своих курсовых углах. Если же новая отметка оставалась на своем месте по пеленгу, ясно, что это дальняя цель, и с ней начинали работать, маневрируя при необходимости. В сложных ситуациях в подводном положении командир практически неотрывно следил за обстановкой на индикаторах ГАК «Рубин». Предлагаем познакомиться с двумя такими примера из периода опытной эксплуатации подводной лодки К-162 проекта 661.
В феврале 1971 года (почти через год после ввода в строй) в центральной части Баренцева моря подводная лодка К-162 впервые обнаружила иностранную атомную подводную лодку. На тот момент, закончив выполнение программы скоростных испытаний, лодка сбросила ход до 8 узлов и пошла в соответствии с планом в другой полигон боевой подготовки.
В.Г.Сугробов вспоминал: "...Было обеденное время, и я подменял вахтенного офицера второй боевой смены. Вдруг в тишине центрального поста раздался доклад вахтенного гидроакустика главного старшины Б.Мандрико: «Шум винтов слева 120! Работает турбина! Пеленг резко меняется на нос! Предполагаю цель - атомная подводная лодка!». Мы все уставились на индикатор кругового обзора «Рубина». Я скомандовал: «Магнитофон на запись!». Командир подводной лодки покинул свое кресло и встал за спиной гидроакустика. Пеленг просто «катился» на нос, что свидетельствовало об очень малой дистанции между подводными лодками (впоследствии по прокладке определили дистанцию расхождения в 2 - 3 кабельтова)..".
Была определена скорость цели -порядка 15 узлов. Как только цель вошла в носовой сектор, командир скомандовал рулевому «Лево руля!», и К-162 заняла позицию слежения на курсовом угле цели примерно 160 градусов правого борта. В дальнейшем был классифицирован контакт, определены параметры движения цели. А затем в соответствии с требованиями руководящих документов К-162 всплыла на перископную глубину и передала радио на берег об обнаружении иностранной подводной лодки. Порядок есть порядок.
Не удивительно, что после таких маневров и особенно при всплытии, К-162 была обнаружена противником. Иностранная подводная лодка начала маневрировать в попытке оторваться от слежения. Как потом вспоминали на "Анчаре", цель осуществляла полные циркуляции то в одну, то в другую сторону, изменяла скорость, глубину погружения. Но любой маневр цели на К-162 сразу фиксировался, и командир, не отрываясь от индикатора гидроакустического комплекса «Рубин», давал необходимые команды рулевому и всему ГКП. Советская подводная лодка продолжала сохранять занятую позицию слежения и полностью контролировали обстановку.
Поняв, что такими способами оторваться от советской лодки не удается, иностранная подводная лодка начала плавное увеличение хода. Эти действия на борту К-162 также были зафиксированы, и для сохранения дистанции лодка тоже начала увеличивать ход, что для нее не составляло никаких проблем. Лодка проекта 661 была очень динамичная и быстро набирала скорость. Но при этом сразу же возникала другая проблема.
С ростом скорости возрастали и собственные помехи работе гидроакустического комплекса. Поэтому возможности К-162 в увеличении хода были ограничены. Цель продолжала увеличивать ход. Вскоре ее скорость уже достигла 18-20 узлов. И акустики на К-162 начали терять шумы цели при своей скорости уже 12 узлов, между тем дистанция между лодками увеличивается, а контакт с целью стал теряться.
Сугробов предложил командиру замерить дистанцию до цели в режиме эхолокации. По его команде дали две посылки и замерили дистанцию. После этого для сокращения дистанции на пять минут дали ход 24 узла. Затем, сбросив ход до 8 узлов, обследовали горизонт, но на этот раз обнаружить цель уже не удалось. Видимо в момент такого "подскока" К-162 иностранная субмарина сбросила ход и отвернула. Да, приходится признать, что гидроакустические средства лодки не могли эффективно работать на собственных больших скоростях. Показательным был и второй эпизод, но о нем – в следующий раз.
А здесь отметим один аспект. Любопытно, что свой опыт работы с гидроакустиками в ЦП капитан-лейтенант В.Г.Сугробов попробовал использовать в дальнейшем. После окончания Военно-морской академии, будучи заместителем начальника отдела гидроакустики подводных лодок Радиотехнического управления ВМФ и имея непосредственное отношение к проектированию подводных лодок в части радиоэлектронного вооружения, а затем и служа в Научно-техническом комитете ВМФ, он постарался вернуться к данному вопросу.
Он вспоминал: … я старался убедить сотрудников специализированного института ВМФ и разработчиков в необходимости расположения пульта управления гидроакустическим комплексом в центральном посту подводной лодки, однако применительно к подводным лодкам третьего поколения этот вопрос ставить было уже поздно. А работы же по четвертому поколению накрыла «перестройка» и все пошло «через пень-колоду…».
Что ту скажешь, не все хорошие предложения могут быть реализованы "в металле". Друзья, а как у вас работал гидроакустический комплекс на больших скоростях, и что вы думаете о месте его размещения на подводной лодке?
Продолжение будет позже. Ссылка будет ЗДЕСЬ.
P.S.Кнопка для желающих поддержать автора - ниже, она называется "Поддержать", )).
P.P.S. С наступающим праздником, друзья. С днем Великой Победы!