
Привет всем, кто не боится учиться! 👋
Мы продолжаем разговор о работе силы, энергии и их взаимосвязи.
Вспомним, что тело (система тел) обладает энергией, когда может совершать работу. При совершении работы, состояние системы меняется, а само состояние системы характеризуется положением тел и их скоростями. Мы уже разобрали как энергия зависит от скоростей тел (ознакомиться с материалами можно тут), сегодня перед нами стоит задача установить зависимость энергии системы от положения тел. Приступим!
Но сначала подписывайтесь на мой телеграм-канал, там я выкладываю посты в другом формате, так что их легко можно использовать для своих докладов и презентаций.
Итак, говорить про зависимость энергии системы от положения тел мы будем с помощью работы силы. Так как силы могут быть самыми разнообразными, то и формулы для вычисления работы данных сил будут различны. Следовательно, и формулы для вычисления энергии будут разными. Мы ограничимся наиболее простыми силами, которые часто встречаются при решении задач.
Забежим немного вперед и сразу дадим определение потенциальной энергии:
📌 Потенциальная энергия - это энергия взаимодействия тел, обусловленная их взаимным расположением или взаимным расположением частей тела.
Важно, что кинетическая энергия - величина, относящаяся к одному телу, а потенциальная энергия - это всегда энергия взаимодействия по меньшей мере двух тел (или частей одного тела) друг с другом. То есть, если в системе имеется несколько тел, то полная потенциальная энергия системы равна сумме потенциальных энергий всех пар взаимодействующих тел.
Далее мы будем рассматривать частные случаи:
1. Потенциальная энергия взаимодействия тела и Земли (энергия обусловлена взаимным расположением тел);
2. Потенциальная энергия деформированной пружины (энергия обусловлена взаимным расположением частей тела).
При выводе формул, связывающих изменение потенциальной энергии с работой сил, одно из тел системы принимают за неподвижное, так мы и поступим ниже. Из-за этого потенциальную энергию системы двух тел привыкают рассматривать как энергию одного тела, но нужно помнить, что по сути это не так.
1. Потенциальная энергия взаимодействия тела и Земли
Рассмотрим систему тел, состоящую из земного шара и тела, поднятого над поверхностью Земли, например камня.
На камень со стороны Земли действует сила тяжести, направленная вертикально вниз (на небольших расстояниях от поверхности Земли эту силу можно считать постоянной).
Вычислим работу силы тяжести при перемещении камня вверх вдоль прямой АВ.
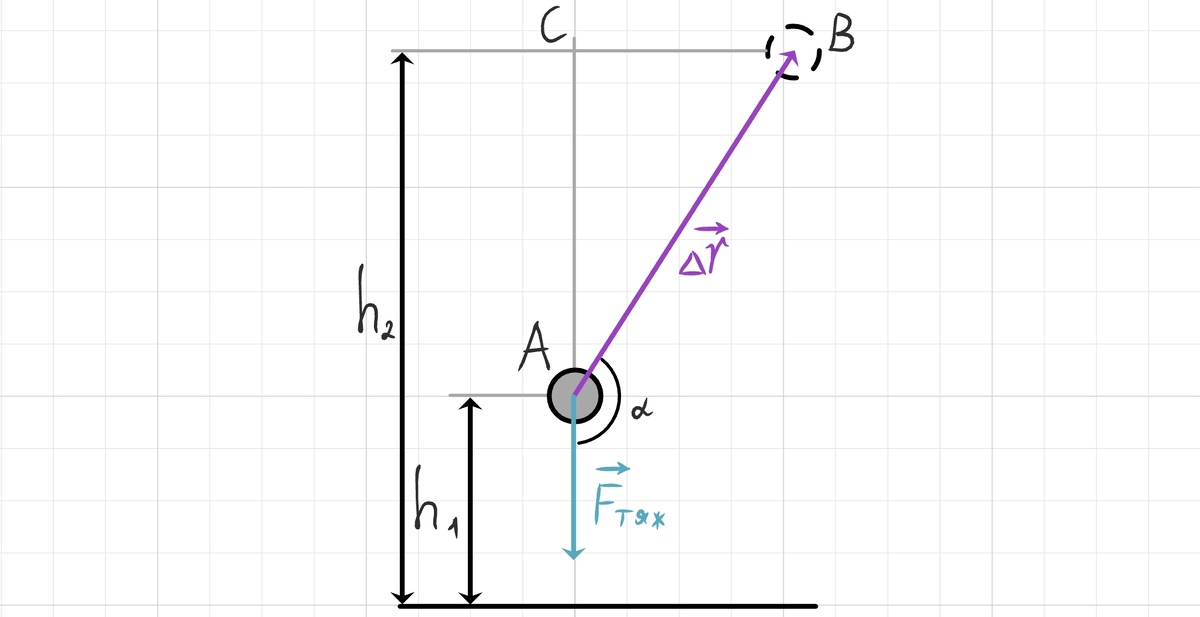
Пусть начальная точка А находится на высоте h1 над Землей, а конечная точка В - на высоте h2. Запишем работу силы тяжести в данном случае:
Нам нужно связать перемещение камня АВ с высотами h1 и h2, для этого рассмотрим прямоугольный треугольник АВС. Катет АС можно выразить через гипотенузу АВ с помощью функции косинуса:
Преобразуем косинус угла А, используя теорему о смежных углах и формулу приведения:
Таким образом катет АС будет равен:
Вернемся к формуле работы и заменим в ней произведение АВ·cos(α) на -АС:
Поскольку длина отрезка АС равна разности высот h2-h1, получим следующее выражение:
Определим, что
📌 Величину, равную произведению массы m тела на ускорение свободного падения g и высоту h тела над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли:
Таким образом, выражение для работы можно переписать так:
📌 Работа силы тяжести равна изменению потенциальной энергии, взятому с противоположным знаком.
Пару важных замечаний.
1. При выводе формулы мы не учитывали работу силы, действующей на Землю со стороны камня. Это связано с тем, что перемещение Земли ничтожно мало из-за ее огромной массы. Можно сказать, что Землю в системе тел "Земля - камень" мы принимаем за неподвижное тело.
2. Работа силы тяжести не зависит от формы траектории и определяется только начальным и конечным положением тела.
Действительно, если мы рассмотрим случаи, когда тело двигалось вертикально вниз, вниз под углом к горизонту или вниз по криволинейной траектории, то работа силы тяжести в данных примерах будет одинаковой. Это выполняется, если начальное (h1) и конечное (h2) положения тела находились на одной высоте над поверхностью земли, как показано на рисунке выше.
3. При движении тела по замкнутой траектории работа силы тяжести равна нулю.
4. Силы, работа которых не зависит от формы траектории и работа которых по замкнутой траектории равна нулю, называют консервативными силами. Системы, в которых действуют только эти силы, также называют консервативными.
Далее мы увидим, что сила упругости деформированной пружины также является консервативной.
2. Потенциальная энергия деформированной пружины
Рассмотрим пружину, у которой один конец закреплен неподвижно, а к другому концу прикреплен шар. Вычислим работу, которую совершает сила упругости при перемещении шара из точки А в точку В.
Заметим, что сила упругости, возникающая в пружине, является переменной, а модуль перемещения шара равен разности координат x1-x2. Для вычисления работы переменной силы упругости воспользуемся графиком зависимости модуля силы упругости от координат шара.
Работа силы равна площади фигуры под кривой графика зависимости силы, действующей на тело, от пройденного телом пути. В нашем случае необходимо вычислить площадь трапеции АВСD. Основания трапеции численно равны силам F1 и F2, а высота трапеции равна x1-x2. Таким образом работа силы упругости равна (по формуле площади трапеции):
Распишем силы F1 и F2 с помощью закона Гука (о законе Гука можно прочитать здесь):
Так как мы хотим связать работу с изменением потенциальной энергии, а под изменением величины всегда понимают разность между ее конечным и начальным значениями, то в нашей формуле нужно вынести знак "минус" за скобки (x2 - конечное удлинение пружины, x1 - начальное удлинение пружины):
Определим, что
📌 Величину, равную половине произведения коэффициента упругости k тела на квадрат удлинения или сжатия x, называют потенциальной энергией упруго деформированного тела:
Таким образом, выражение для работы можно переписать так:
📌 Работа силы упругости пружины равна изменению потенциальной энергии пружины, взятому с противоположным знаком.
Опять же несколько важных замечаний.
1. При выводе формулы мы не учитывали работу, которую совершает сила упругости, приложенная к стенке. Поскольку этот конец пружины не перемещается (фактически он скреплен с земным шаром), то работа силы, приложенной к стенке, равна нулю.
2. Работы силы упругости не зависит от формы траектории и, как и сила тяжести, сила упругости является консервативной.
3. Если начальное и конечное состояния пружины совпадают, то суммарная работа сил упругости при деформации пружины равна нулю.
4. Потенциальная энергия упруго деформированной пружины не зависит от свойств тел, которые связывает пружина. Эту энергию следует считать сконцентрированной в пружине.
🏁 Подведем итог 🏁
Работа таких сил, как сила тяжести и сила упругости (то есть консервативных сил) не зависит от формы траектории. Поэтому работу можно представить как разность потенциальной энергии в конечном и начальном состояниях системы. Значение потенциальной энергии зависит от характера действующих сил.
И потенциальная, и кинетическая энергии являются функциями состояния системы, то есть они точно определены, если известны координаты и скорость всех тел системы.
Изменение кинетической энергии всегда равно работе всех сил, действующих на тело.
Работа консервативных сил всегда может быть представлена как приращение потенциальной энергии, взятое с противоположным знаком:
Если вы дочитали до конца, значит Вас действительно интересует физика! Поэтому подписывайтесь на канал, чтобы не пропустить следующие статьи, а также ставьте палец вверх👍
Это мотивирует быстрее публиковать новые материалы!