Всем привет!
Сейчас занимаюсь редизайном своего старого набора для обучения на базе Ардуино. Статья про первую его версию была написана довольно давно. Набор довольно типовой - на Али таких наборов куча. Но так как я имею (но чаще он меня) 3Д принтер, то была разработана конструкция примерно похожая. Вообще версий данного набора у меня было несколько. Я деже не знаю сколько точно. Остались фотографии первых проектов, можно сравнить что изменилось. Первое фото это то, что есть сейчас, а другие то, что было.
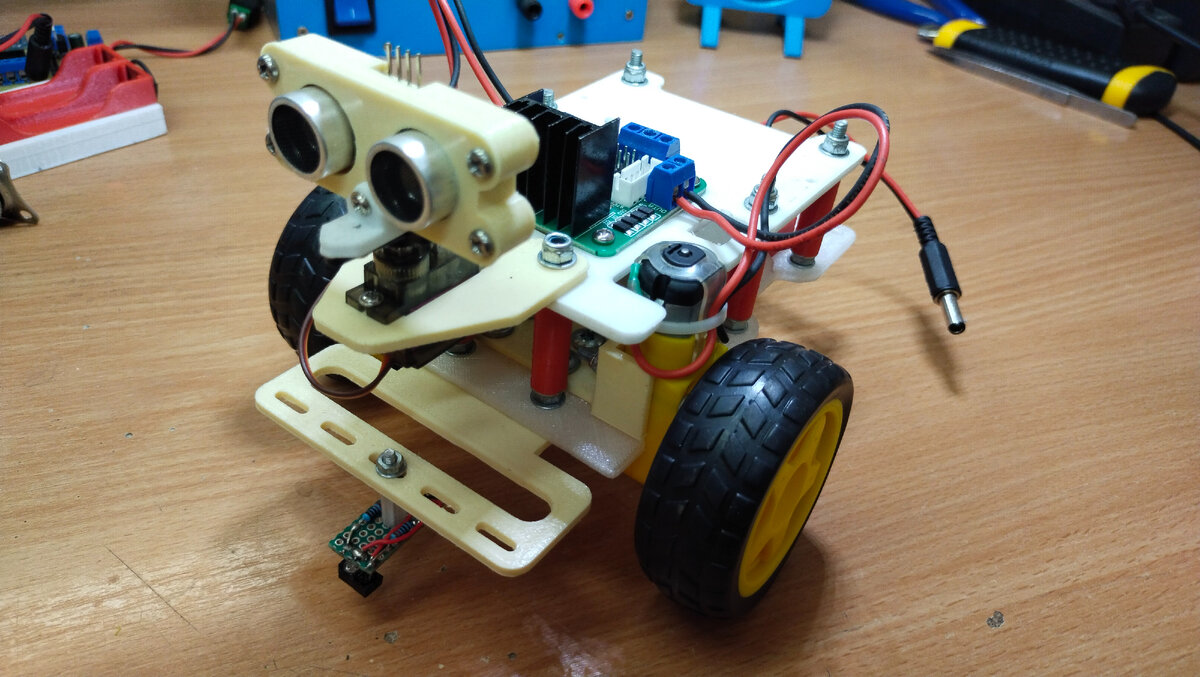
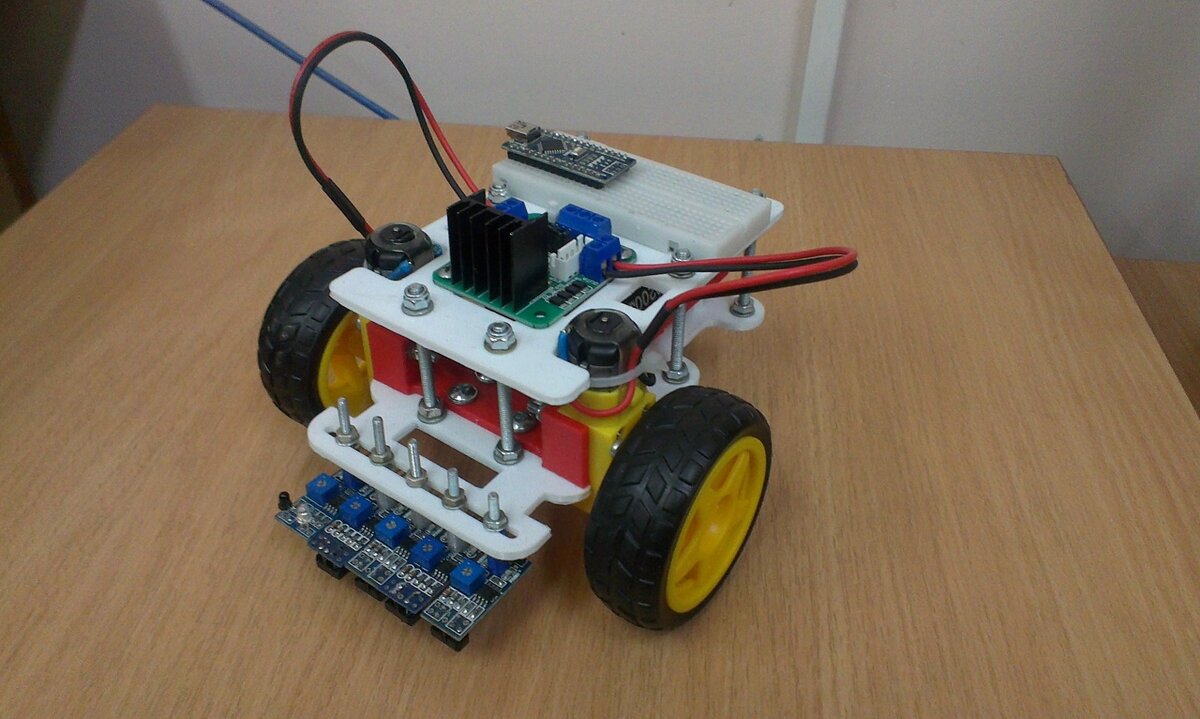
Конструктив такой - две полки с расположенными на них оборудованием и два желтых мотор-колеса. Основная проблема данных моторов - они не имеют датчиков для подсчета количества оборотов. Я долго думал как можно организовать что-то подобное, не переделывая полностью конструктив. Хотел сделать на базе щелевого датчика и на базе датчика Холла, но что-то пока не нашел приемлемого решения. Тут конечно напрашиваются шаговые двигатели или сервоприводы с постоянным вращением, но это повлечет изменения конструкции. В общем, этот вопрос пока не решен до конца. Хотелось бы обойтись малой кровью.

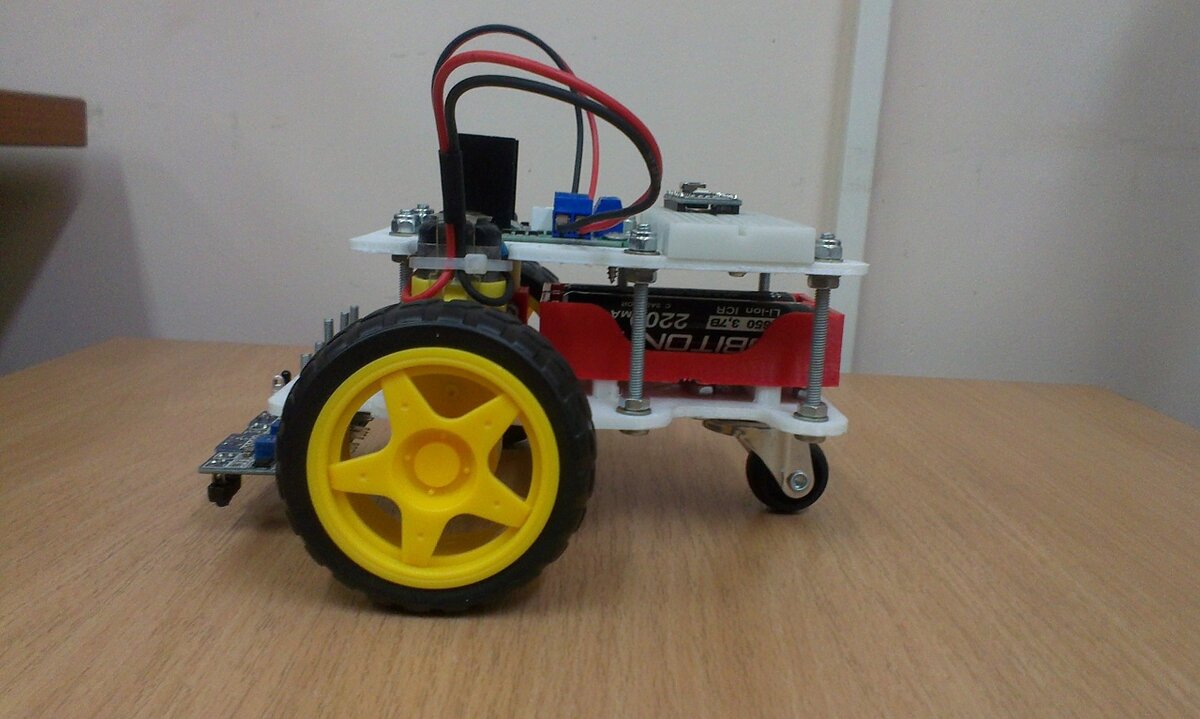
Питание осуществляется от 2 сосисок 18650 соединенных последовательно. Далее подаем на контакт Vin и на драйвер моторов. Все просто.
Решил также переделать плату управления. До этого была просто Ардуино нано воткнутая в брэдборд и целый ворох проводов выходящих от него. Теперь я решил уйти от этой ненадежной конструкции. Развел плату и теперь будем подключать другие блоки через клемники. Под сервоприводы сделал отдельный стабилизатор на 5 В. Ну и плюс добавил разъемы для подключения Gnd и слаботочки на 5 В. При проектировании накосячил с размерами под отверстия крепления, и с разводкой питания - придется переделать(.
Все еще не знаю в какую сторону будет лучше поставить датчики на полосу. Тут проблема в третьем колесе, оно довольно кривое и не всегда отрабатывает повороты. Пожет иногда загнуться не сразу, вес машины не велик и подшипники плохо прижимаются между пластинами. Плюс там еще смазка какая-то непонятная была, пришлось все промывать. И все таки я склоняюсь к тому, что перед будет там, где стоят колеса.
Добавилась пристройка на предполагаемой передней части, оснащенная УЗИ датчиком и сервой. Это поможет отработать движение в замкнутых пространствах, ну или движение в лабиринте. Надо еще будет проверить на какой высоте эта штука будет лучше всего работать. Может оказаться, что получилось высоко и стены потребуюсь довольно высокие. Тут нужен эксперимент.
Думаю сделать данную модель основной для проведения мастер классов по программированию на Ардуино. Есть еще две другие штуки, но про них я пожалуй напишу чуть позже.
В конце предлагаю написать в комментариях обоснованную критику данного набора. Возможно я что-то упустил из вида, или можно добавить какой-нибудь обвес.
На этом не прощаюсь! Увидимся в следующей статье.