Как инженеру конструктору, мне все время хочется привнести в этот мир, что-то полезное и интересное. А так как я еще и преподаю в кружке робототехники, вектор моих изобретений устремлён в этом направлении.
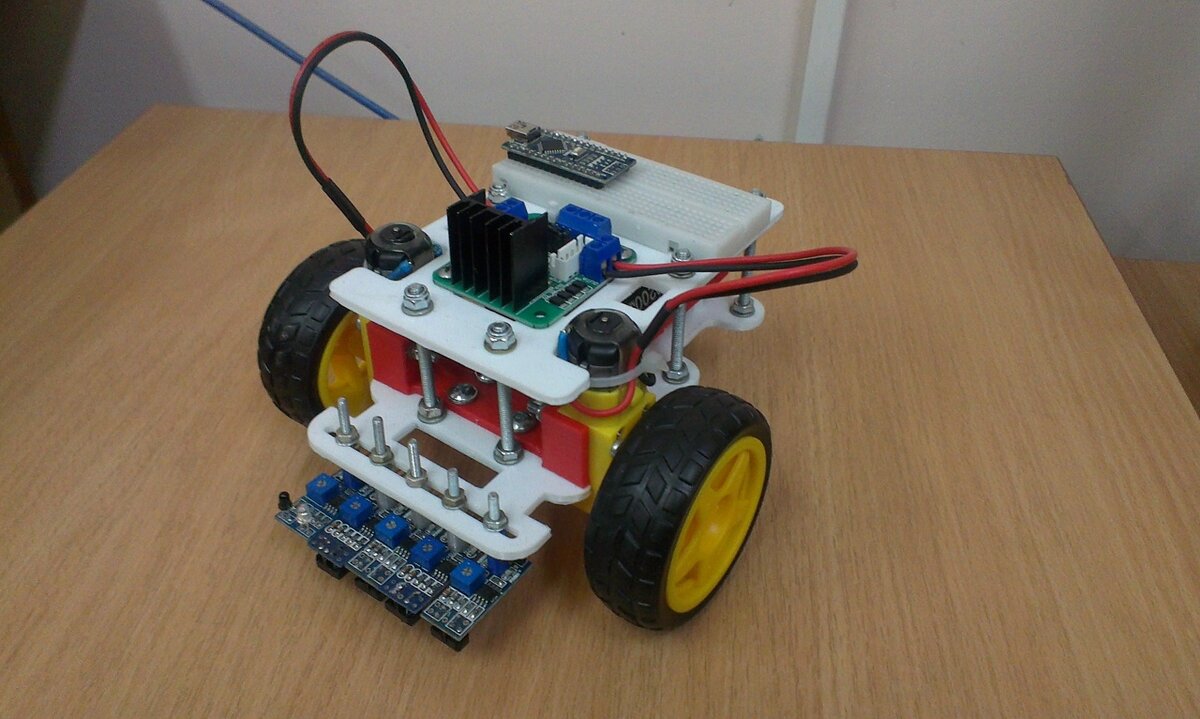
Первоначально поделки на базе платы Ардуино строились из всякого хлама и всегда имели некий незаконченный, неряшливый вид. С появлением 3Д принтера качество и разнообразие изделий улучшилось, но повторяемость хромала. Решено было разработать конструктор с подробной инструкцией по сборке и программированию, для рассмотрения типовых задач. Среди базовых алгоритмов в робототехнике является движение по линии. Чтобы отрабатывать различные комбинации датчиков была создана разборная модель. Основа трех колесное шасси. Два колеса ведущие, а третье поворотное.
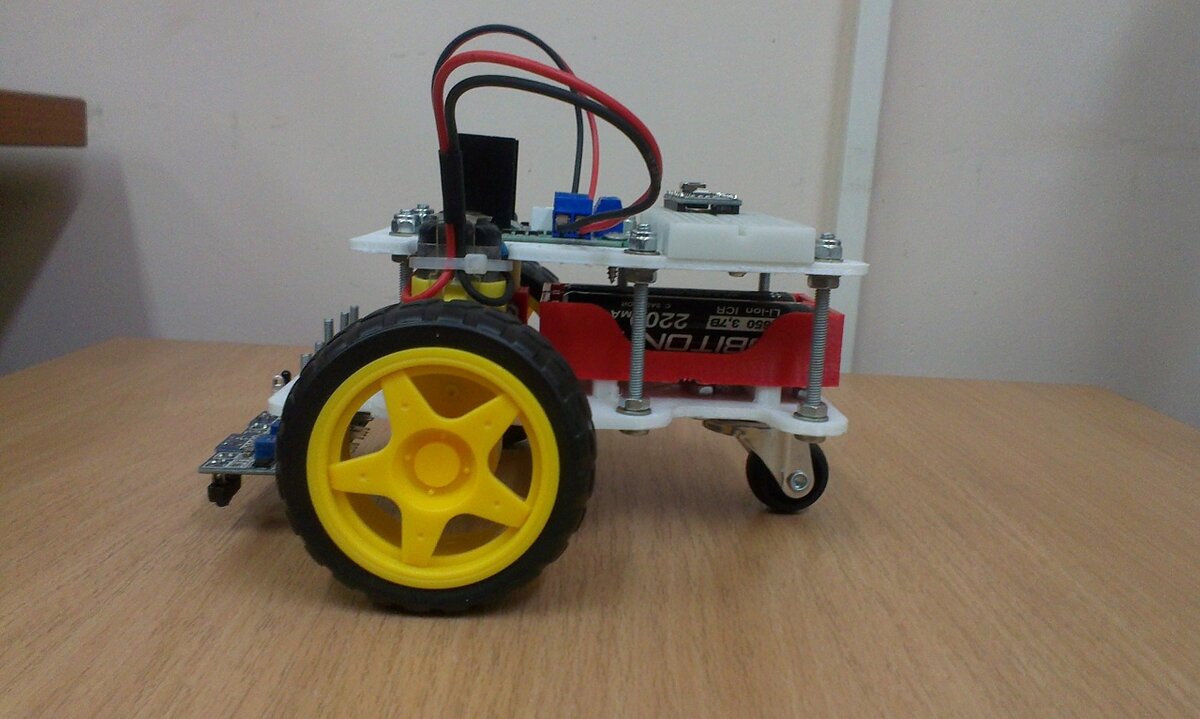
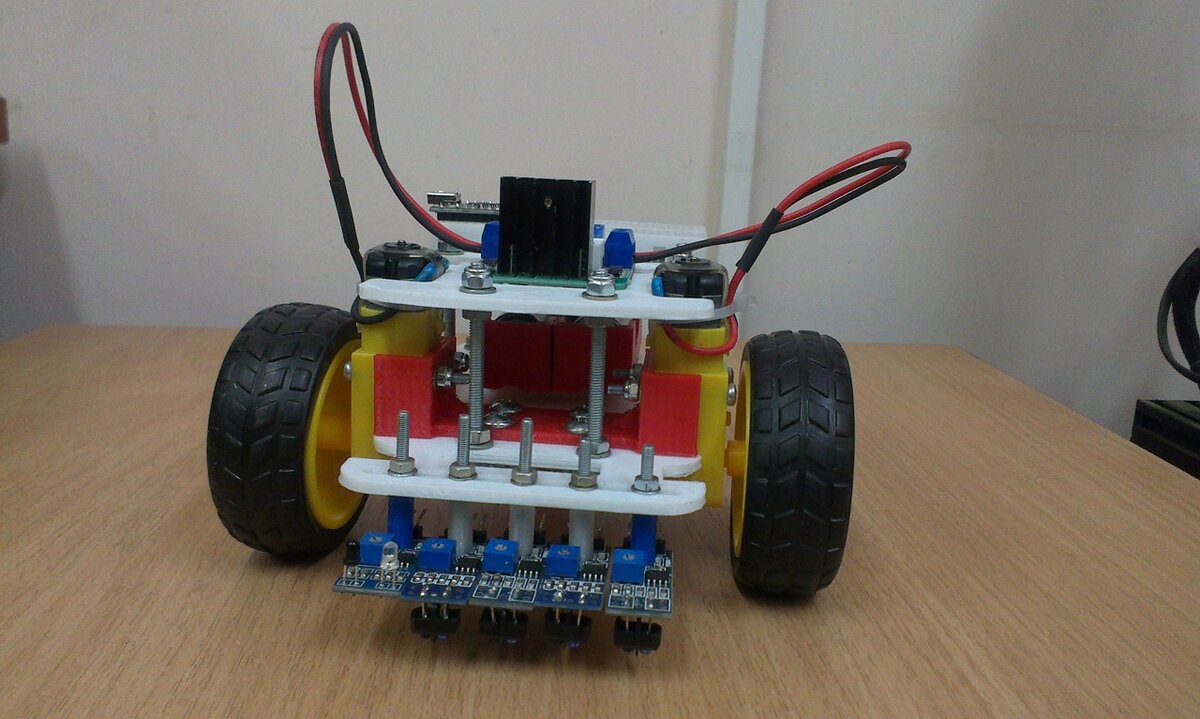
В дальнейшем робот претерпел еще несколько изменений. Ведущие колеса перенес назад, подкорректировал расположение датчиков и прочие мелочи. В целом модель вполне рабочая, если правильно подобрать алгоритмы обработки сигналов с датчиков. Большим недостатком данных моторов является отсутствие датчиков положения или хотя бы датчика оборотов. Хотя у меня есть щелевые диски для ИК датчиков и датчики есть, но что-то руки пока не дошли. Что нам дали бы эти датчики? Мы бы могли совершать точные перемещения по полю, научились бы объезжать препятствия по заданной траектории. Возможно в будущем это будет исправлено.
Для всех компонентов заказал ящик для хранения. Инструкцию тоже заказал на местной типографии, но в последующем пришлось частично изменить некоторые вещи и поэтому от неё пока отказались в пользу электронно версии.

Электрика
Давайте посмотрим на схему электрических соединений.
За основу питания взяты 2 LiOn аккумулятора 18650 соединенных последовательно. На выходе получим напряжение около 8 В. Аккумуляторы лучше ставить с платой BMS, чтобы избежать лишних деталей в конструкции. Или разработать отдельный аккумуляторный блок, со всеми необходимыми защитами и контроллером для подзарядки.
Напряжение напрямую идет на плату драйвера двигателя Драйвер L298N и плату Ардуино на вход Vin. На драйвере, как и на плате Ардуинки, распаян стабилизатор для питания. Питание на моторы подается при нажатии кнопки включения на драйвере. Тут все просто. Для наших моторов 8 В, вполне годиться - ничего не пахнет, не греется. Сигнальные линии с L298N подключаются к выводам платы Ардуино, через брэдборд. Кстати последний изготовлен из большого (отпилен в размер).
До этого использовали драйвер L293D, но решил взять эту плату из-за удобства подключений и монтажа.
Вот его характеристики:
- Напряжение питания логики: 5V;
- Потребляемый логикой ток: 36mA;
- Напряжение питания моторов: от 5V до 35V;
- Рабочий ток драйвера: 2 А;
- Пиковый ток драйвера 3 А;
- Максимальная мощность: 20 Вт (при температуре 75о С);
- Диапазон рабочих температур: -25оС…+135оС;
- Размеры модуля: 43.5 х 43.2 х 29.4 мм;
Питание датчиков линии идет с контакта 5V. Предварительно его нужно вынести на отдельные линии брэдборда, так как питающих соединений будет много. То же проделываем с GND. Долго думал как убрать эти тучи проводов более красиво, но пока увы... Пишите в комментарии ваши варианты. Лучшая идея будет принята на вооружение.
Теперь давайте рассмотрим используемые датчики. Это стандартные модули с компаратором на LM358 и крутилкой для настройки порога срабатывания. Следует обратить внимание на то, что у требуемого модуля должны иметься 4 вывода. Два на питание и два на выходные сигналы. Один будет выдавать нам аналоговый сигнал, а второй цифровой. Для дискретных сигналов за единицу будет приниматься положение над черной линией, а 0 -на белом. Данным переменным резистором очень трудно добиться точной сработки, что-то там китайцы не додумали. Либо номинал не тот, либо оптопары разные от партии к партии. Обычно мы работаем с аналоговым сигналом, так как он более правильно отражает положение робота над полем.
Вообще можно спаять свой аналоговый датчик линии. Для этого понадобятся ИК светодиод, ИК фототранзистор и два резистора. Из схемы выше просто выкидывается операционный усилитель и переменник. Выход на Ардуинку берем с коллектора фототранзистора. Все просто.
На данной модели можно проработать все основные приемы движения вдоль черной линии. Разберем их последовательно от самого простого к самому сложному с применением ПИД-регулятора.
Продолжение здесь.