Многие процессы в автоматизации (например порошковая покраска, изготовление выпечки, поддержание давления в трубопроводе) требуют точного регулирования физического параметра. С такими задачами хорошо справляется библиотека CoDeSyS ПИД регулятор. Эта тема довольно сложная, многогранная. Целые институты занимаются разработкой таких сложных и многоуровневых алгоритмов.
Приветствую посетителей моего блога! В сегодняшней статье я отвечу на вопрос — как работает ПИД-регулирование, для чего это нужно и как его использовать на практике…
Как работает ПИД-регулятор?
Начнём с теории. Пропорционально-интегрально-дифференциальный (ПИД) регулятор — прибор в управляющем контуре с обратной связью. Устройство, формирующий сигнал с целью достижения высокого качества и точности переходного процесса в системе. Наиболее эффективный вид регулятора для обеспечения высокой точности параметра(температуры, длины, давления).
Существует специальная формула для формирования сигнала…

Ниже приведена таблица составляющих формулы:
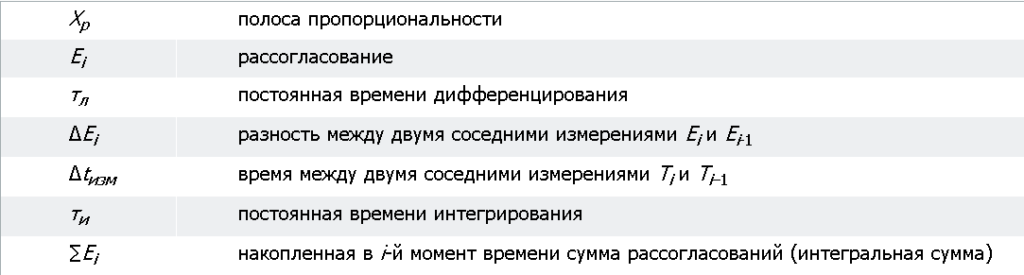
Давайте поговорим о параметрах, которые непосредственно участвуют в процессе работы регулятора:
Хр — полоса пропорциональности. В общих чертах, чем шире Хр, тем меньше величина Y при одном и том же E. То есть чем больше Хр, тем короче импульсы.
Ти — интегральная составляющая. Эта величина позволяет выдавать сигнал в зависимости от накопленной ошибки ( или от накопленного отклонения Е). Чем выше параметр, тем он реже и меньше выдаёт сигнал при рассогласовании Е. Это для того, чтобы сигнал не раскачивал систему и не совершал перерегулирование.
Тд — дифференциальная составляющая. Эта величина позволяет выдавать сигнал Y, при дополнительных резких возмущениях в системе. по — русски говоря, этот параметр срабатывает, когда нужно быстро среагировать на возмущающие воздействия. Естественно, чем он больше, тем длиннее импульс.
Я думаю с точки зрения теории все понятно. Тогда переходим непосредственно к практике. Для чего и как используется ПИД-регулятор?
Описание библиотеки для CoDeSyS
Я говорил об этом, скажу ещё раз, библиотеки обязательно скачивайте с официальных источников. С сайта ОВЕН или библиотеки OSCAT. Рекомендую не использовать библиотеки с форумов или с других источников. Пишите лучше сами. Только вы понимаете от начала до конца, как у вас всё работает.
Для задвижек я рекомендую использовать данный функциональный блок, он хорошо зарекомендовал себя, и за всё время работы на реальном объекте у меня не было к нему никаких вопросов. На изображении ниже приведён функциональный блок ПИД-регулятора.
Описание каждого входа и выхода:
Входные значения:
Выходные значения:
Хочу заметить, функциональный блок универсальный. То есть подходит и для дискретных задвижек, и для аналоговых.
Рабочая схема ПИД-регулятора
Возникает сразу же вопрос, а как же на самом деле правильно использовать данную библиотеку, чтобы она правильно функционировала и не глючила?
Предлагаю вам рабочую схему библиотеки ПИД-регулятора:
setAPID_otopl является вспомогательным блоком для ввода коэффициентов ПИД-регулятора. Хочу сказать, что на входах блока обязательно должны стоять какие-то переменные, пускай даже если будут стоять в положении FALSE.
А какие вы используете библиотеки в своих проектах? Пишите в комментариях. На этом я заканчиваю, хорошего вам настроения, всего наилучшего. Пока, пока.
С уважением, Гридин Семен



















