В конструкции захвата найден баланс между «силой, точностью и мягкостью».
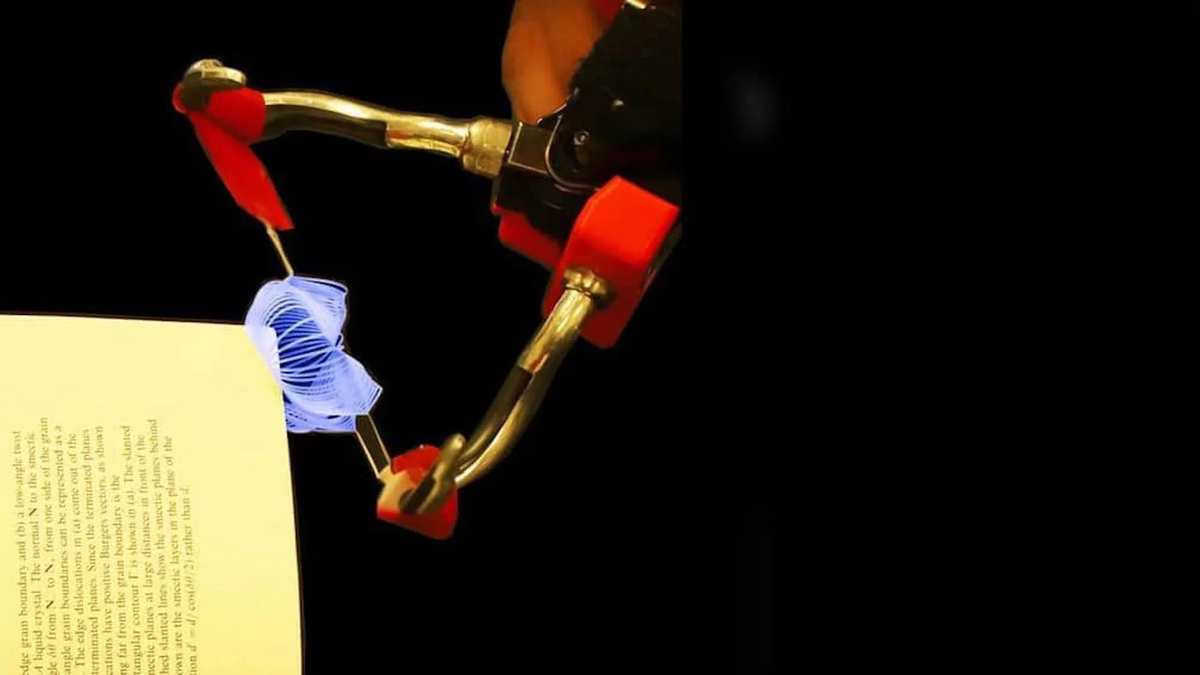
Японское искусство вырезания и складывания бумаги, известное как оригами, служит источником вдохновения для создания оригинальных роботов, но последний пример может оказаться самым универсальным и впечатляющим. Как впервые было описано в журнале Nature Communications в начале этого месяца, группа специалистов из университета штата Северная Каролина недавно разработала новый мягкий захват для роботов, достаточно чувствительный, чтобы работать с каплями воды и переворачивать страницы книг, но при этом достаточно прочный, чтобы достичь соотношения полезной нагрузки к весу 16 000. После дополнительных доработок, по мнению инженеров, этот захват может найти применение в самых разных отраслях промышленности, а также в протезировании конечностей человека.
"Разработать единый мягкий захват, способный работать с ультрамягкими, ультратонкими и тяжелыми предметами, сложно из-за компромисса между прочностью, точностью и мягкостью, - отметил автор научной стати Цзе Инь, доцент кафедры механической и аэрокосмической инженерии NC State. - В нашей конструкции достигнут отличный баланс между этими характеристиками".
Если предыдущие мягкие захваты были разработаны с использованием элементов оригами, созданные исследователями усиковидные структуры распределяют силу таким образом, чтобы быть достаточно деликатными и точными, чтобы помочь застегнуть молнию на одежде ли подобрать монеты. Как недавно отметил журнал New Scientist, форма и угол наклона позволяют захватам весом 0,4 грамма удерживать предметы весом до 6,4 килограмма, что в 2,5 раза превышает предыдущий промышленный рекорд.
Поскольку возможности захватов зависят от их конструкции, а не от самих материалов, команда также продемонстрировала дополнительные возможности, создав их итерации из листьев растений. Потенциал биоразлагаемых захватов может оказаться чрезвычайно полезным в ситуациях, когда они необходимы лишь временно, например, при работе с опасными медицинскими отходами, такими как иглы.
Если этого оказалось недостаточно, команда NC State сделала еще один шаг вперед, проведя эксперимент по прикреплению захватов к миоэлектрическому протезу руки, управляемому через мышечную активность предплечья пользователя. "Новый захват не может заменить все функции существующих протезов рук, но он может быть использован для дополнения этих функций, - говорит Хелен Хуанг, соавтор статьи и заслуженный профессор семейства Джексонов Объединённой кафедры биомедицинской инженерии NC State. - Одним из преимуществ захватов киригами является то, что не нужно заменять или дополнять существующие двигатели, используемые в роботизированных протезах. При использовании захватов можно просто использовать существующий двигатель".
Инь, Хуанг и их коллеги надеются в будущем сотрудничать с производителями роботизированных протезов, компаниями, занимающимися переработкой пищевых продуктов, а также электронными и фармацевтическими предприятиями для разработки дополнительных вариантов использования их мягких захватов.
Приходите на мой канал ещё — буду рад. Комментируйте и подписывайтесь!
Поддержка канала скромными донатами (акулы бизнеса могут поддержать и нескромно):
Номер карты Сбербанка — 2202 2056 2618 8509 (Александр Васильевич Ж.) Пожалуйста, сопроводите сообщением: «Для Панорамы».