Как было сказано выше, если в каком-либо механизме на рис. 8.1-8.7 открепить опорное колесо, то этот механизм получит вторую степень свободы и станет дифференциалом. В результате, для замыкания такой кинематической цепи потребуется сопряжение свободного зубчатого колеса или водила с каким-либо внешним объектом (регулировочным устройством, вторым двигателем и т.п.).
На рис. 8.14 приведена схема четырехзвенного дифференциала, в основу которого положена конструкция планетарного механизма на рис. 8.2. Здесь при вращении центрального колеса (входного звена) приводятся в движение все звенья устройства, причем между ними отсутствует жесткая кинематическая связь и любое внешнее воздействие приведет к изменению угловых скоростей ведомых звеньев. Для обеспечения правильной работы системы необходимо управление свободными звеньями. Подобные решения применяют в планетарных коробках передач.
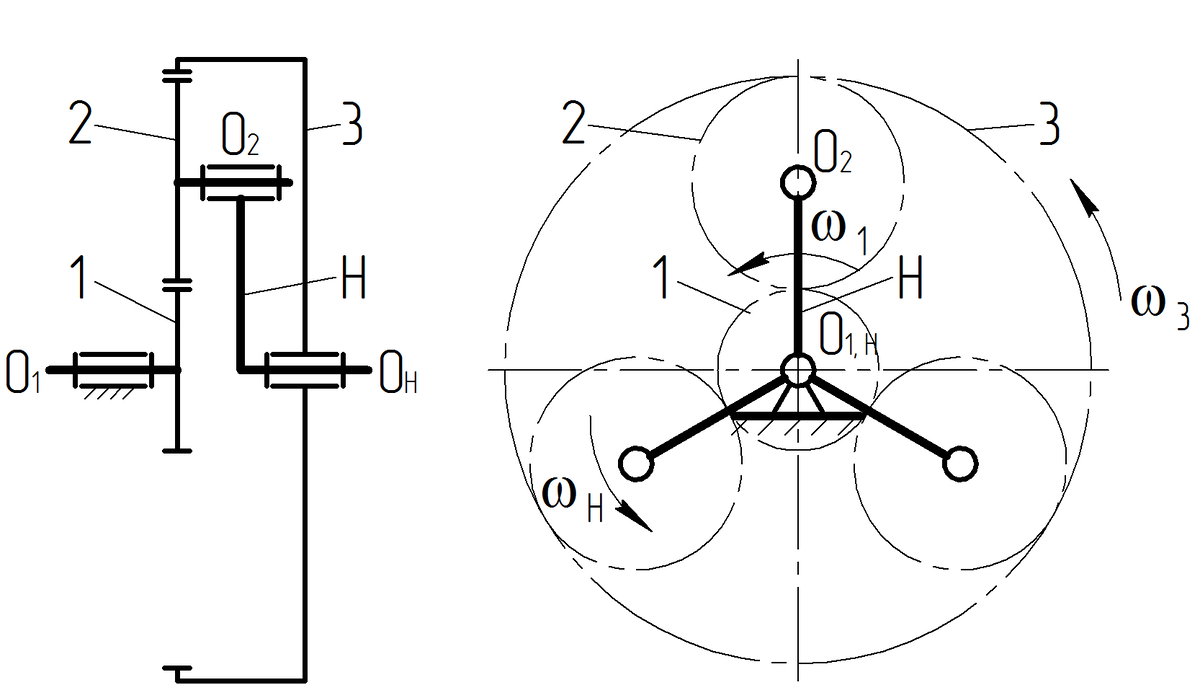
Если ведущими звеньями рассматриваемого механизма будут колеса 1 и 3, ведомым звеном – водило H, а направления вращения звеньев – согласно рис. 8.15, то для определения угловой скорости водила следует записать формулу Виллиса для дифференциалов [1]

где передаточное отношение U13(H) следует определять по формуле (8.5).
Формулу (8.35) допускается записывать через частоту оборотов
откуда частота оборотов водила H
что с учетом знаков примет вид
Знак «минус» перед z3/z1 в формуле (8.38) объясняется тем, что передаточное отношение U13(H) для рассматриваемого механизма является отрицательным, согласно формуле (8.5), а знак «минус» перед n3 – тем, что колеса 1 и 3 на рис. 8.15 вращаются в противоположные стороны по сравнению с исходной схемой (рис. 8.14).
При закреплении опорного колеса (n3 = 0) дифференциальный механизм станет планетарным и формула (8.36) примет вид формулы (8.4)
из которой можно будет рассчитать передаточное отношение U1H(3).
Если ведущими звеньями будут колесо 1 и водило H, а ведомым звеном – колесо 3 (рис. 8.15), то частота оборотов колеса (3) из формулы (8.36)
или
При закреплении водила H (nH = 0) механизм на рис. 8.15 превратится в редуктор с внутренним зацеплением и паразитной шестерней 2 (паразитной называется шестерня, которая не влияет на передаточное число, но влияет на направление вращения)
При закреплении колеса 1 (n1 = 0) формула (8.36) примет вид
откуда частота оборотов колеса 3
или
На рис. 8.16 приведена конструкция привода автомобиля (главная передача) [1]. Такой привод содержит конический дифференциал, состоящий из зубчатых колес 1 и 2, коробки H (водила), которая, в свою очередь, содержит сателлиты 3 и зубчатые колеса 4 и 5. Все зубчатые колеса и сателлиты являются коническими.
Во время поворота автомобиля ведущие колеса А и Б катятся по соответствующим траекториям α–α и β–β, причем траектория α–α заметно короче траектории β–β. В результате, угловая скорость колеса Б должна быть больше угловой скорости колеса А. Для воспроизведения движения колес с различными скоростями и служит дифференциал. Коническое зубчатое колесо 1, установленное на валу III, приводится во вращение через валы I и II от раздаточной коробки. Это колесо входит в зацепление с другим коническим зубчатым колесом 2, вращающимся свободно вокруг полуоси IV. На колесе 2 закреплена коробка H, являющаяся водилом. В коробке H на осях O3 установлены два одинаковых сателлита 3 с возможностью свободного вращения. Каждый из сателлитов 3 входит в зацепление с двумя одинаковыми коническими зубчатыми колесами 4 и 5, закрепленными на полуосях IV и V.
При движении автомобиля по прямому участку угловая скорость колес А и Б одинакова, следовательно, вращение с зубчатого колеса 2 передается на полуоси IV и V без изменения угловой скорости. Таким образом, коробка H вместе с сателлитами 3 и полуоси IV и V вращаются как одно целое в одну и ту же сторону с одинаковой угловой скоростью. Сателлиты 3 при этом не поворачиваются вокруг осей O3. При движении колес А и Б по кривым α–α и β–β различных радиусов кривизны, сателлиты 3 начнут поворачиваться вокруг осей O3. Поворот сателлитов 3 будет таким, что зубчатое колесо 5 получит дополнительное вращение, совпадающее с направлением вращения зубчатого колеса 2, а дополнительное вращение зубчатого колеса 4 при этом будет противоположно. Это приведет к увеличению угловой скорости колеса Б и уменьшению угловой скорости колеса А.
Передаточное отношение каждого дифференциального механизма определяется по формуле Виллиса. Для рассматриваемого конического дифференциала эта формула примет вид
где n4 и n5 – частота оборотов зубчатых колес 4 и 5; nH – частота оборотов коробки H (водила).
Передаточное отношение в числах зубьев
где знак «минус» поставлен потому, что направление вращения колес 4 и 5 при неподвижной коробке H различно. Таким образом, формула (8.45) с учетом (8.46)
Если одно из конических колес, например колесо 4, остановится (n4 = 0), то колесо 5 будет делать в два раза больше оборотов, чем коробка H
Если неподвижной будет коробка H, то колеса 4 и 5 будут вращаться с одинаковым числом оборотов, но в противоположных направлениях
На следующем видео наглядно показана кинематика рассмотренных дифференциальных механизмов
[1] Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов. – 6-е изд., стереотипное. – М.: ИД Альянс, 2011. – 640 с.