Планетарные механизмы также известны как зубчатые механизмы с подвижными осями вращения. Если планетарный механизм работает на понижение частоты оборотов, его называют планетарный редуктор. Известны планетарные механизмы, преобразующие вращательное движение в возвратно-поступательное (режущая система Schumacher) и реверсивное (механизм перевода зубострогальных станков 5А250 и 528С).
Особенностью конструкции планетарных механизмов является наличие одного или нескольких зубчатых колес с подвижной осью вращения. При этом планетарные механизмы характеризуются одной степенью свободы. При наличии двух степеней свободы такой механизм будет называться дифференциальным (или дифференциалом).
Подвижную ось вращения в планетарных механизмах называют водилом (обозначается буквой H), а зубчатое колесо, расположенное на таком звене, – сателлитом. Остальные зубчатые колеса в планетарных механизмах носят называния:
- солнечное (или центральное) – колесо с неподвижной осью вращения;
- опорное – неподвижное колесо.
На рис. 8.1, а, приведено изображение простейшего планетарного механизма, а на рис. 8.1, б, – его кинематической схемы. Звеньями такого механизма являются: H – водило, 1 – сателлит, 2 – опорное колесо. При вращении водила H с угловой скоростью ωH, сателлит 1, расположенный на нем и находящийся в зацеплении с опорным колесом 2, вращается в противоположную сторону с угловой скоростью ω1 вокруг оси O1 и перемещается вокруг точки O2 (или оси OH) вместе с водилом H.
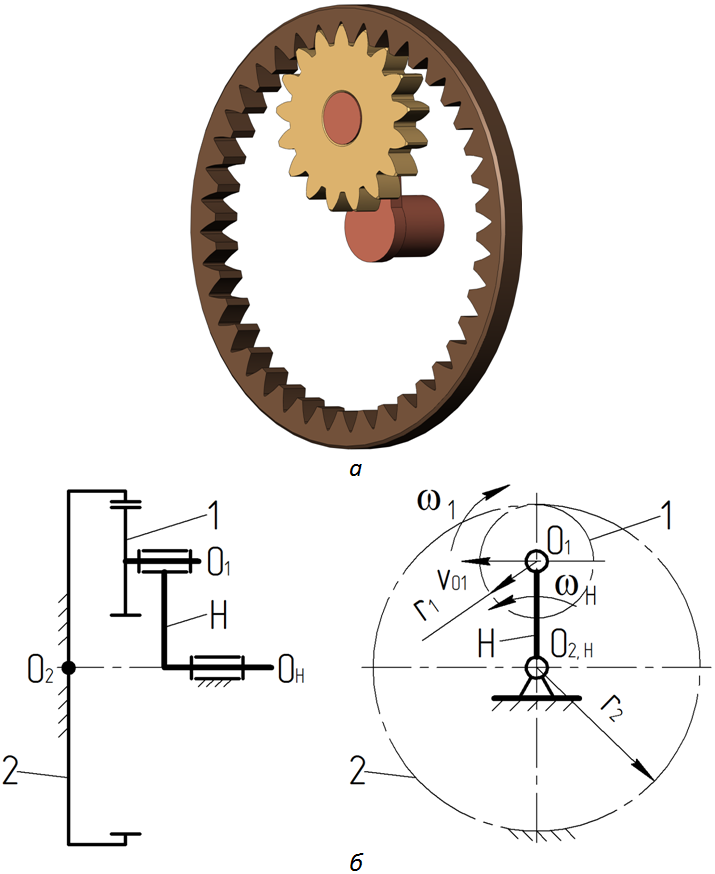
Связь между угловыми скоростями ω1 и ωH может быть установлена через скорость точки O1 (рис. 8.1, б)

где r1 – радиус сателлита 1, м (мм); r2 – радиус опорного колеса 2, м (мм).
Передаточное отношение планетарного механизма U1H (первый индекс обозначает то звено, угловая скорость которого находится в числителе)
где z1 – число зубьев сателлита 1; z2 – число зубьев опорного колеса 2; U12 – передаточное отношение от сателлита 1 к колесу 2.
Согласно общепринятой методологии, в передаточных отношениях выражения (8.2) следует поставить верхние индексы неподвижности звеньев: U1H(2) – передаточное отношение при неподвижном опорном колесе 2; U12(H) – передаточное отношение при мнимо неподвижном водиле H и мнимо подвижном колесе 2
Планетарный механизм на рис. 8.1, ввиду того что его выходное звено сателлит 1 совершает сложное движение, используется исключительно в тестомесильных машинах, универсальных миксерах и других аналогичных устройствах. В современном оборудовании в качестве понижающей или повышающей передачи широкое распространение получила следующая классическая схема планетарного механизма, приведенная на рис. 8.2. Такой механизм содержит солнечное колесо 1, сателлит 2, опорное колесо 3 и водило H. При работе на понижение частоты оборотов входным звеном механизма будет являться солнечное колесо 1, а выходным – водило H. Передаточное отношение U1H(3) от солнечного колеса 1 к валу водила H
В рассматриваемой кинематической цепи (рис. 8.2, б) при мнимо неподвижном водиле H и мнимо подвижном колесе 3 движение будет передаваться от колеса 1 колесу 2, а затем от колеса 2 колесу 3. Передаточное отношение U13(H) этой цепи
где z1 – число зубьев центрального колеса 1; z2 – число зубьев сателлита 2; z3 – число зубьев опорного колеса 3.
Выражение (8.4) с учетом (8.5)
Обе части выражения (8.6) являются положительными, что говорит об одинаковом направлении угловых скоростей центрального колеса ω1 и водила ωH.
В случае, когда механизм на рис. 8.2 будет передавать движение от водила H к центральному колесу 1, в исходной формуле (8.4) числитель и знаменатель должны быть поменяны местами
С учетом выражения (8.5)
откуда видно, что механизм будет работать на повышение оборотов, поскольку значение UH1(3) будет меньше 1.
Известны планетарные механизмы с наружным зацеплением (рис. 8.3). Здесь относительно опорного колеса 2 вращается водило H с установленным на нем сателлитом 1. Передаточное отношение такого механизма можно определить по формуле (8.3), а в случае ведущего звена водила
При этом учитывая, что передаточное отношение U12(H) будет в данном случае отрицательным (7.14), формулы (8.3) и (8.9) можно записать как
При добавлении четвертого подвижного звена с целью преобразования планетарного движения во вращательное, планетарный механизм наружного зацепления может быть сконструирован по типу редуктора Джемса, но с коническим колесом (рис. 8.4) или по типу механизма Давида (рис. 8.5). Передаточное отношение механизма на рис. 8.4 может быть определено по формулам (8.6) и (8.8), поскольку колеса 1 и 3 при мнимо неподвижном водиле будут вращаться в разные стороны (U13(H) отрицательное).
В четырехзвенном планетарном механизме Давида сателлит 2-2` считается за одно звено, но с различным числом зубьев для каждого из зацеплений: z2 и z2`. Передаточное отношение кинематической цепи при мнимо неподвижном водиле здесь будет записываться от подвижного колеса 3 до мнимо подвижного колеса 1
Передаточное отношение редуктора при закрепленном колесе 1
Планетарные механизмы могут иметь самые различные конфигурации. Например, на рис. 8.6 приведена модификация планетарного редуктора Давида.
В представленном механизме сателлиты 2 и 2` считаются за одно звено и являются зубчатыми колесами внутреннего зацепления, а опорное колесо 1 и центральное колесо 3 являются колесами наружного зацепления.
При вращении водила H с угловой скоростью ωH центральное колесо 3 приводится во вращение с угловой скоростью ω3. Поскольку входным звеном является водило H, а передаточное отношение каждой пары внутреннего зацепления является положительным, расчет передаточного отношения UH3(1) такого механизма может быть выполнен по формуле (8.13).
Помимо этого, формула (8.13) может использоваться для определения передаточного отношения прецессирующего редуктора (рис. 8.7), у которого вместо внутреннего цилиндрического зацепления используется внутреннее коническое. Водило в прецессирующем редукторе выполнено с прецессией, тогда как в редукторе на рис. 8.6 оно выполнено с эксцентриситетом.
Для достижения максимальных передаточных чисел в механизмах на рис. 8.6 и 8.7 разница в зубьях для каждой из пары зацеплений должна быть одинаковой и как можно меньшей. Внутреннее коническое зацепление допускает разницу в один зуб у сопряженных деталей. В результате, передаточное отношение редуктора на рис. 8.7 при числах зубьев z1 = 19; z2 = 20; z2` = 21; z3 = 20 составляет
а редуктора на рис. 8.6 при z1 = 19; z2 = 29; z2` = 30; z3 = 20 (разница в десять зубьев для каждой пары)
Следует отметить, что механизмы на рис. 8.6 и 8.7 при высоких передаточных отношениях обладают крайне низким КПД. По этой причине рекомендуется использование более простых схем планетарных редукторов, например, циклоидальных (рис. 8.8). Несмотря на большее количество деталей, такие редукторы обладают передаточными числами в несколько десятков, а их КПД обычно выше 90%.
В циклоидальных редукторах чаще всего используется звездочка с перициклоидальным профилем (рис. 8.8, а, рис. 8.9), реже – с гипоперициклоидальным профилем (рис. 8.8, б, рис. 8.10). Входным звеном здесь является водило, а выходным – вал W-механизма (рис. 8.11, а).
При проектировании перициклоидального редуктора (рис. 8.8, а, рис. 8.9) за исходные параметры принимаются диаметр расположения цевок dц и число выступов на звездочке z1. Диаметр центроиды цевочного колеса dw2, мм
где ε – коэффициент смещения выступов звездочки.
Диаметр центроиды звездочки dw1, мм
где n = z1 + 1 – число цевок, которое должно быть на 1 больше числа выступов звездочки.
Межосевое расстояние aw, мм
Диаметр впадин звездочки df1, мм
где Dрол – диаметр ролика (цевки), мм.
Диаметр вершин звездочки da1, мм
При проектировании гипоперициклоидального редуктора (рис. 8.8, б, рис. 8.10) исходными параметрами являются диаметр расположения цевок dц и число выступов на звездочке z2. Диаметр центроиды цевочного колеса dw1, мм
Диаметр центроиды звездочки dw2, мм
где n = z2 – 1 – число цевок, которое должно быть на 1 меньше числа выступов звездочки.
Межосевое расстояние aw, мм
Диаметр впадин звездочки df2, мм
Диаметр вершин звездочки da2, мм
Угловые шаги φ1 и φ2 в обоих случаях вычисляются путем деления 360° на соответствующее число выступов и цевок.
Рис. 8.11 содержит сведения для проектирования W-механизма, который необходим для преобразования планетарного движения звездочки (или цевочного колеса в случае на рис. 8.8, б) в простое вращательное движение. Здесь Dо – диаметр окружности расположения пальцев, мм; dп – диаметр пальцев, мм. Оба эти параметра выбираются конструктивно. При этом диаметр пальцев должен быть таким, чтобы они могли противостоять нагрузке и в то же время не прослаблять звездочку, поскольку диаметр отверстий dо, мм, под них является несколько бóльшим
Для гипоперициклоидальной передачи (рис. 8.8, б, рис. 8.10) W-механизм проектируется точно таким же образом, однако здесь отверстия dо должны быть выполнены в цевочном колесе.
Передаточное отношение для редуктора на рис. 8.8, а, будет определяться по формуле
а для редуктора на рис. 8.8, б
Для каждого из приведенных на рис. 8.8 механизмов передаточное отношение составляет
так как в механизме на рис. 8.8, а, 39 выступов на звездочке и 40 цевок, а в механизме на рис. 8.8, б, 39 цевок и 40 выступов на звездочке. Знак «минус» говорит о том, что водило (входное звено) вращается противоположно валу W-механизма (выходному звену).
Наглядное представление кинематики планетарных механизмов.