Началом создания этого интересного механизма, указывается 1962 год, когда отдел исследований компании General Electric в Питтсфилде, штат Массачусетс, провел работу для армии США. Работа заключалась в разработке и возможности создания шагающей пилотируемой машины, для того, что использовать ее в особо сложных условиях местности, «где даже тракторы могут застрять».
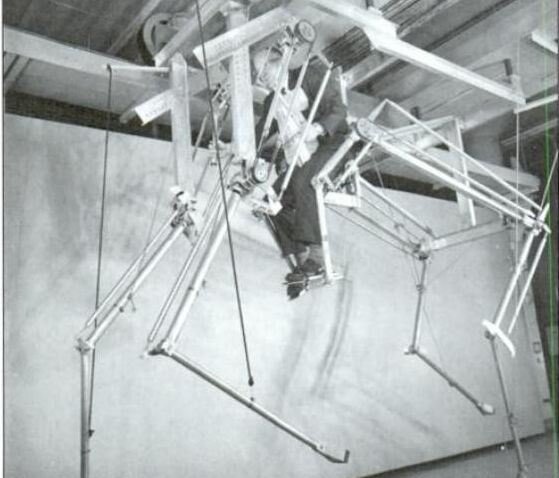
Разработку возглавил Ральф Мошер. Механизм, получивший альтернативное имя «CAM» (Cybernetic Anthropomorphous Machine), официально назывался «педипулятором». Главной идеей машины должно было стать управление, которое заключалось в том, что «ногами» устройства должны были «управлять» ноги оператора, а «руками» (т.е. передними, опять-таки, «ногами»), руки.
Тех задание предполагало, что скорость этого устройства может достигать 35 миль/ч (55 км/ч). Две или три машины могли бы быть выстроены в ряд, как люди, несущие носилки, и, таким образом, помогать пехоте в переноске как раненых, так и дополнительного оборудования, снаряжения и боеприпасов.
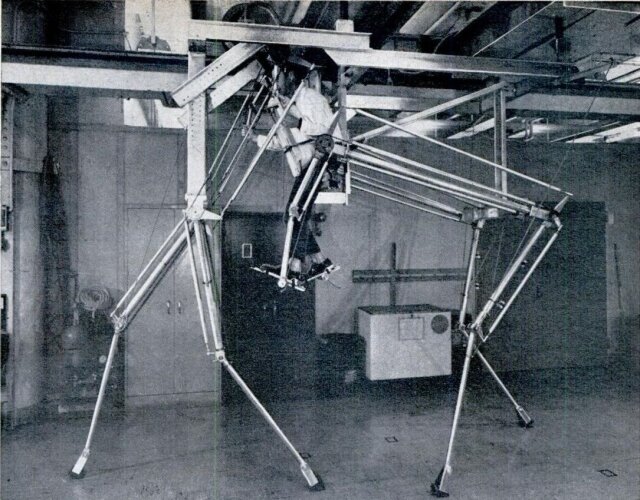
На самом деле при разработке такого сложного механизма возникшие трудности не позволили достигнуть желаемого. Остаточно непросто оказалось реализовывать обратную связь по усилию, позволяющую оператору почувствовать, что происходит под ногами педипулятора. Кроме оператора корпус аппарат должен был вмещать электронные схемы, сервоприводы и прочие силовые приводы. Все сервоприводы были реализованы на гидравлике. И в итоге конструкция получилась весом 1400 кг, и двигаться могла только со скоростью около 8 км/ч.
Но, к концу разработки, к середине 1965 года, впечатленные результатами действий и возможностей педипулятора, Министерство обороны и Армейский танковый и автомобильный центр не только одобрили концепцию САМ, но и попросили GE выпустить четвероногую полу-амфибию - CAM (Cybernetic Anthropomorphous Machine), которая была представлена публике в апреле 1969 года.
Несмотря на отдельные работы по созданию комфортных условий для человека-оператора, вынужденного работать в течение продолжительных периодов времени в необычной системе, исследователи зашли в тупик, и в докладе указывалось на необходимость дополнительного исследования «человеческого фактора».
Самым неприятным для разработчика моментом было то, что управление было утомительным, и, по словам руководителя программы Ральфа Мошера (который был и проектировщиком и основным водителем), операторы могли управлять шагающим грузовиком только в течение ограниченного времени – уставали мышцы и связки.
«Cybernetic Anthropomorphous Machine» появлялся в эпизоде документального фильма «20 век», продюссируемый Уолтером Кронкайтом в 1968 году.
Видео с YouTube канала Reuben Hoggett
Фото из открытых источников сети Интернет
Уважаемый читатель. Если материал понравился, пожалуйста, ставь лайк и подписывайся на канал. Это сейчас особенно актуально для развития "НМ". Спасибо, что ты с нами!