Гонки это не шахматы, тут думать надо. И думать приходится обо всем сразу. О физике — как влияет температура, ветер на твое время круга. О химии — как влияет на сцепление состав резины. О психологии — как поведут себя пилоты вокруг тебя на трассе. О философии — как лучше настраивать себя на гонку. И конечно, о математике, о геометрии поворотов и лучшей гоночной траектории.
Мне давно интересно узнать, как мощность и сцепление влияют на оптимальную гоночную линию. Гонщики и тренеры часто говорят о преимуществах линии с поздним апексом, но насколько она лучше других линий? И зависит ли это от того, сколько мощности у автомобиля? Или от того, насколько велико сцепление с дорогой? Другими словами, должен ли я менять свою линию, если я на Miata против Corvette? Или на асфальте или на грунтовой дороге? Давайте выясним это с помощью небольшой математики.
Для этого упражнения я буду моделировать поворот как имеющий 5 отдельных фаз. В реальности все они сливаются воедино, но я разделяю их, чтобы упростить математические вычисления.
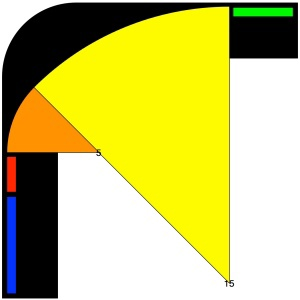
- Прямая линия (синяя). На входе в поворот автомобиль движется с фиксированной скоростью. Длина будет меняться в зависимости от формы прямой, но скорость - нет.
- Торможение (красный). Длина зоны торможения ровно настолько велика, чтобы автомобиль успел замедлиться со скорости движения по прямой до скорости входа в поворот.
- Вход в поворот (оранжевый). Скорость прохождения первой половины поворота полностью определяется его радиусом и сцеплением шин с дорогой. В этой модели нет торможения на траектории. В приведенном примере радиус равен 5 единицам.
- Выход из поворота (желтый). Опять же, скорость полностью определяется радиусом второй половины поворота и сцеплением шин с дорогой. На рисунке выше радиус составляет 15 единиц. В этой модели скорость резко меняется между входом в поворот и выходом из него. По этой причине это плохая модель для транспортных средств с очень низким ускорением, таких как велосипеды, которые не могут сильно ускориться между двумя радиусами. В реальности существует плавный переход между скоростью и радиусом, и модель должна подходить даже для медленных гоночных автомобилей.
- Дроссель (зеленый). Увеличение скорости в этой зоне определяется мощностью автомобиля. Ускорение здесь всегда меньше или равно сцеплению шин с дорогой.
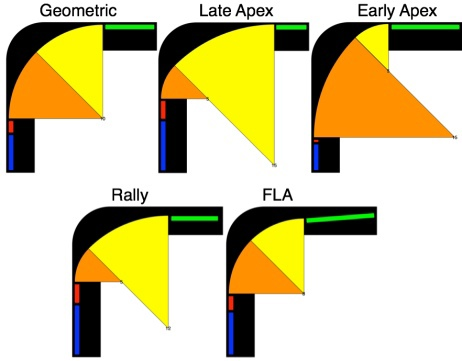
Для этого эксперимента я собираюсь определить 5 видов гоночных траекторий. Большинство пилотов знают достаточно, чтобы расположиться на внешней стороне трассы и пройти через апекс (или какой-то апекс в любом случае). Так что все эти траектории учитывают это. Но все они немного отличаются друг от друга.
Геометрическая форма. Радиусы входа и выхода одинаковы. Поэтому скорость прохождения поворота постоянна на протяжении всего поворота. Несмотря на его повсеместное присутствие в книгах по вождению, почти никто не ездит по этой линии. Она практически никогда не является оптимальной и служит скорее для сравнения, чем для чего-либо еще.
Поздний апекс. Это классическая гоночная линия, где радиус входа меньше, чем радиус выхода. Скорость прохождения поворота увеличивается во второй половине поворота.
Ранний апекс. Инструкторы обычно избегают этого метода, но он имеет свое применение. Скорость прохождения поворота снижается во второй половине поворота.
Раллийная траектория. Это разновидность траектории позднего апекса, когда радиус входа меньше радиуса выхода. Но автомобиль не едет до самого края трассы. Это жертва некоторой скоростью ради безопасности.
Ложный поздний апекс (ЛПА). Это геометрическая линия среднего радиуса, которая имеет вид позднего апекса, поскольку автомобиль апексирует (проходит ближе всего к внутренней стороне трека) после середины поворота. Однако она не имеет изменения радиуса, и автомобиль не проходит всю траекторию до конца. Большинство водителей HPDE непреднамеренно используют эту линию. Вот несколько характерных признаков: (1) автомобиль оказывается в середине трассы, (2) водитель направляет автомобиль к выходной точке(а не выводит его из поворота), (3) руль остается неизменным на протяжении всего поворота, (4) дроссель нажимается только после апекса (5) если дроссель нажимается агрессивно слишком рано, автомобили с задним приводом заносит.
Важность торможения
Какая длина зоны торможения? Это полностью зависит от радиуса оранжевого цвета. Правильно, ваша стратегия торможения определяется радиусом входа в поворот. Если вы войдете слишком быстро, ваш автомобиль будет скользить по большему радиусу, что испортит ваш поворот и может вывести вас за пределы трассы. Если вы войдете в поворот слишком медленно, вы потеряете драгоценные десятые доли секунды. Попытки исправить свою ошибку могут привести к тому, что вы усугубите ситуацию во второй половине поворота.
Большинство водителей говорят о том, где они начинают тормозить. Некоторые (быстрые) говорят о том, где они перестают тормозить. Я хочу предложить альтернативу. Возможно, самый важный момент обсуждения - как достичь точной скорости для предполагаемого радиуса. Если вы сможете это сделать, у вас будет шанс пройти поворот оптимально. Но каким должен быть предполагаемый радиус? Другими словами, какая самая быстрая линия прохождения поворота?
Что лучше?
Какая из них самая быстрая и на сколько? Чтобы ответить на эти вопросы, рассмотрим два параметра: сцепление шин с дорогой и ускорение автомобиля. Мы можем выразить оба этих параметра в значениях G (количество ускорения от ускорения свободного падения). Мы привыкли говорить о сцеплении шин с дорогой G, но характеристики автомобилей на прямой обычно выражаются в лошадиных силах, крутящем моменте, скорости 0-60, 1/4 мили или даже в соотношении мощность:вес. Важно отметить, что сцепление шин с дорогой ограничивает ускорение. Для наших целей мы будем рассматривать силу G (ускорение автомобиля) не более 0,9G (типичный показатель для шин с протектором 200мм). Чтобы добиться большего, вам понадобятся гоночные слики, прижимная сила или их комбинация. В таблице ниже я упростил данные из некоторых тестов шин Car & Driver и Edumunds.
Миата против Корвета
Miata и Corvette - это гоночные автомобили, поэтому давайте рассмотрим, какая гоночная линия лучше всего подходит для гоночного трека. Оба автомобиля имеют достаточную тягу (0,90G), но они отличаются по мощности. Миате трудно прокрутить шины на выходе из поворота, в то время как Corvette может сделать это легко. Для наших целей мы будем рассматривать Миату с ускорением 0,3 G, а Corvette - с ускорением 0,9 G.
Миата оптимально проходит этот воображаемый поворот за 24,87 секунды на траектории позднего апекса. Раллийная траектория следующая по результативности - 25,10, за ней следуют геометрическая (25,34), ЛПА (25,34) и ранний апекс (26,26). Основное различие между поздним апексом и траекторией ралли заключается в степени разворачивания. При неполном развороте (траектория ралли) теряется 0,23 секунды в одном повороте. Здесь есть важный урок для пилотов болидов с большим импульсом: разворот во второй половине поворота действительно важен! Разворачиваясь, я имею в виду, что во второй половине поворота шины должны скользить так же сильно, как и в первой. Выруливание на выход с трассы не является разворачиванием. Такова линия ЛПА (ложный положительный апекс).
В Corvette ситуация несколько иная. Шокирует то, что самая быстрая траектория - это ралли (23,66 секунды), за которой на 1/100 секунды позже следует поздний апекс (23,67). Почему раллийная траектория немного быстрее? Она короче, и автомобиль быстрее выпрямляется. Удивительно, но траектория ЛПА (23.68) отстает от позднего апекса всего на 1/100 секунды. За ней следуют геометрическая (23,73) и ранний апекс (23,88). В Миате разница между самой быстрой и самой медленной траекториями составляла колоссальные 1,39 секунды, а в Corvette - всего 0,22 секунды. Когда мощность автомобиля превышает сцепление шин с дорогой, гоночная траектория не имеет такого большого значения (если только вы действительно ее не испортите). Если вы видите большую разницу во времени прохождения круга на мощных автомобилях, возможно, дело не в гоночной траектории. Дело может быть в том, насколько хорошо пилот чувствует/боится предела.
Пища для размышлений
Чем быстрее поворот, тем меньше эффективное ускорение автомобиля (из-за передачи). Таким образом, на очень высоких скоростях даже мускул-кары становятся автомобилями с импульсом. А что можно сказать об импульсных автомобилях? Если способность к ускорению сильно ограничена, например, приходится проезжать поворот без мощности (как на скейтборде), то у позднего апекса нет никаких преимуществ. Хотя геометрическая траектория может выглядеть оптимальной на бумаге, для прохождения поворота постоянного радиуса на постоянной скорости требуется мощность. Хотя модель здесь не идеально подходит, давайте вновь рассмотрим Миату на треке (ускорение 0,3 G, сцепление 0,9 G) и предположим, что автомобилю не разрешается ускоряться между 1-й и 2-й половиной поворота. Результаты: геометрическая 25.34, ЛПА 25.56, ранний апекс 26.26, раллийная 28.42, поздний апекс 29.40. Траектория позднего апекса просто ужасна. Если у вас нет мощности, не выбрасывайте импульс!
Выводы
На оптимальную гоночную траекторию влияют как сцепление шин с дорогой, так и мощность автомобиля. Траектория позднего апекса - хорошее место для старта, но она не всегда оптимальна. Водите автомобиль с импульсом? Попробуйте сдвинуть апекс раньше в более быстрых поворотах. Водите мускул-кар? Узнайте предел возможностей автомобиля и трассы. По грязи или снегу? Честно говоря, я не думаю, что это хорошая модель для рыхлых поверхностей, потому что она не учитывает преимущества избыточного поворота автомобиля.