Предисловие: Данная статья появилась в далеком 2009г, потом дополнялась и в 2011г появилась данная финальная версия, оставлю здесь для истории. Сразу оговорюсь, статья писалась в те времена, когда электрические модели багги и трагги 8го масштаба были в диковинку, в самом разгаре были "электроконверсии" моделей ДВС в электричку, выбор электромоторов был не большой. Я намеренно не стал ничего исправлять в тексте, я считаю, что информация в статье актуальна и сейчас, надеюсь кому-нибудь данная информация пригодится. Приятного прочтения!
Целью данной статьи является систематизация имеющихся данных по электрическому приводу радиоуправляемых моделей. В силу того, что в интернете и на форумах непрерывно ведутся дискуссии о выборе того или иного мотора, регулятора и батарей, возникают противоречивые мнения при выборе конкретной силовой установки. Надеюсь, данная информация, будет полезна как новичкам, переходящим с ДВС установки на электро, так и людям уже использующих электричество в качестве привода, для анализа и выводов на будущее. И так, начнем, пожалуй…
I. Начало начал.
Прежде всего, при выборе той или иной установки нужно иметь то, на что вы собираетесь устанавливать электропривод, нужно шасси. Тут самое главное представлять, что вы хотите в итоге получить: неуправляемую мощность с катанием только на задних колесах или сбалансированную установку для участия в соревнованиях, где важно иметь оптимальный вес всей машины и достаточную мощность. Далее для упрощения будем рассматривать условно три типа машин разделенных по весу: 3,7 кг – класс багги, 4,5 кг – класс трагги и монстров и 5,5 класс супер монстров. Для данных типов для сравнения и будем производить расчеты. Для автора наиболее интересен подбор сбалансированной установки багги или трагги для участия в соревнованиях, поэтому на это будет делаться основной упор.
II. Батареи.
Не будем здесь акцентировать внимание на особенностях каждого типа батарей (Ni-Cd, Ni-MH,Li-Po, A123 и т.д.), об этом много общедоступной информации, отметим одно, что здесь будем рассматривать только Li-Po батареи как наиболее перспективные для использования в rc-hobby. Основные параметры аккумуляторных батарей это:
- напряжение В (V), как правило батарея или пак состоит из нескольких элементов соединенных либо последовательно либо параллельно. Для Li-Po номинальное напряжение одного элемента батареи считается 3,7В, все остальные номиналы легко рассчитать исходя из количества элементов в паке и их соединения. Важно понимать и помнить, что полностью заряженный элемент Li-Po батареи имеет напряжение 4,2В, а напряжение отсечки – 3,2В, но для практики достаточно принимать среднее напряжение питания в 3,7В. Элементы внутри могут соединяться параллельно или последовательно в одном пака, например 4S1P означает 4х3,7В = 14,8В, 1P – означает, что батарея состоит из последовательно соединенных элементов по 3,7В в один пак и т.д;
- емкость – например, 4000мАч, то есть, какой средний ток батарея может отдавать в течение часа;
- токоотдача – обозначается 20С, 30С и т.д. то есть, какой максимальный ток может отдать батарея, надо понимать так 20С = 20 х (емкость батареи, например 4000мАч)= 20х4000= 80000мА или 80А. Как правило, на батареях указывают две цифры по токоотдачи - длительную, то есть возможность батареи отдавать ток в течение длительного времени, а также – кратковременную, значение тока который батарея способна отдавать кратковременно, обычно не более 3 сек.
- внутреннее сопротивление батарей, обозначается Ri, размерность W (омы), так же важный параметр, влияет на эффективность всей системы в целом. Рассмотрим данный параметр немного подробнее, на что он влияет. Без небольшого экскурса в школьную физику не обойтись, и так. Для себя важно сразу понимать когда мы говорим про напряжение батареи 14,8В или 22,2В правильно нужно понимать, что для отдельно взятой батареи мы говорит только про электродвижущую силу (ЭДС), то есть тот потенциал которым обладает батарея. Напряжение появляется только тогда, когда мы замыкаем цепь и в цепи течет ток, вот только с этого момента и можно говорить о напряжении, но оно будет меньше чем ЭДС. Посмотрим на сколько:
U бат = Е бат – Iцепи * Ri, (В) (1)
Где Uбат – напряжение на батареи при подключенной нагрузке, В; Eбат- ЭДС батареи напряжение, которое покажет вольтметр при подключении к клеммам батареи без нагрузки!!! I цепи – ток протекающий через батарею при подключенной нагрузке, для нашего случае надо рассматривать максимальный ток отдачи батареи; Ri – наконец-то добрались до внутреннего сопротивления батареи, измеряется в омах (W). Теперь для наглядности приведем таблицу фактического напряжения на клеммах батареи при максимальной токоотдачи, возьмем например батареи фирмы Hyperion G3 с токоотдечей 25С
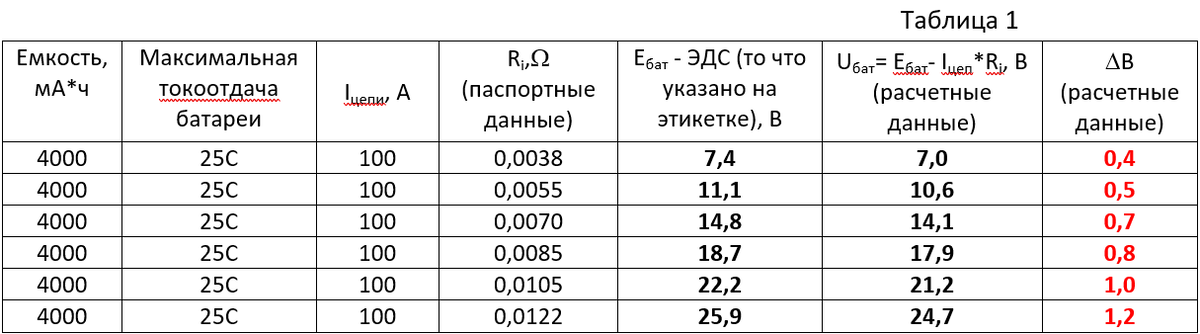
Как видно из табл.1 с увеличением количества элементов в батареи растет её внутреннее сопротивление и как следствие увеличивается падение напряжения на клеммах батареи под нагрузкой. Данный параметр влияет на конечную мощность батареи.
- мощность батареи, так же очень важный параметр, который необходимо учитывать первостепенно при проектировании электроустановки. Так как батарея является источником, энергии, то от правильного её выбора зависит вся мощность электропривода. Теперь снова немного физики. Как известно в электричестве мощность это:
P = Iцеп х U (Вт) (2)
Где Iцеп – ток в цепи, U – напряжение на батарее под нагрузкой (см.табл 1);
Так батарея 22,2В и емкостью 4000 мА*ч (4А*ч) с токоотдачей 25С будет иметь мощность:
22,2 * (25*4) = 2220Вт= 2,22 кВт!!! Но это в теории, мы еще не учли потери на тепло, которые неизбежно будут возникать при протекании тока через батарею. И тут снова придется обратиться к физике (куда же без нее раз мы решили все подробно рассчитать), а именно к закону Джоуля-Ленца, который имеет следующий вид:
Qбат = Iц2*Ri*t, (Дж ) (3)
Где Iц – ток цепи, А; Ri – сопротивление участка цепи, в нашем случае внутреннее сопротивление батареи в W; t – время протекания тока на участке цепи, c;
Закон описывает количество тепла, которое выделится на участке цепи с сопротивлением Ri при протекании тока Iц в течении времени t. Размерность Джоули немного нас пугает, поэтому приведем все к Вт, то есть количество Дж в секунду. И так, для наших батарей получим:
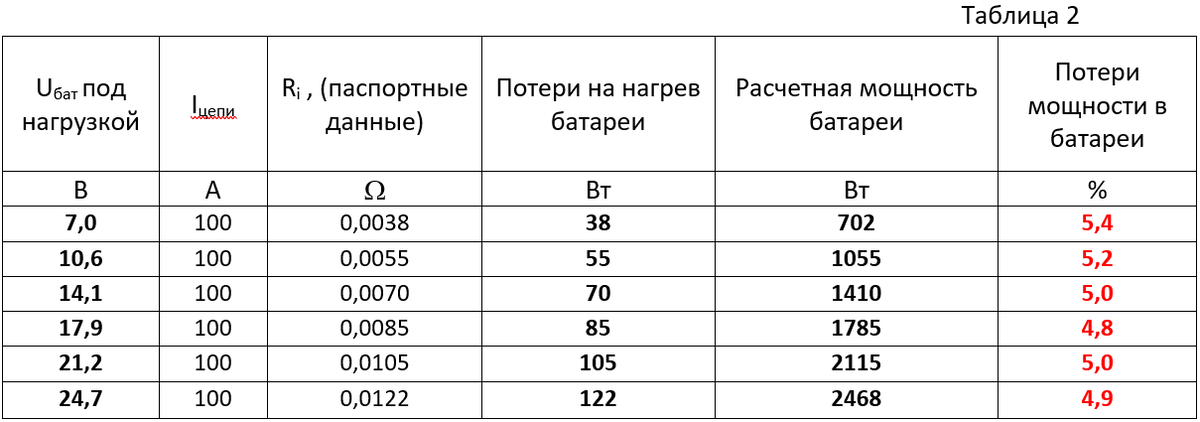
И так, что мы видим, первое – что потери в батареи на тепло в зависимости от режима работы батареи могут составлять более 5 %, а это значит, что для батареи емкостью 5000мАч » 200мАч мы потеряем на нагрев батареи, что, безусловно, скажется на времени катания! Второе – потери на нагрев практически не зависят от количества элементов в батареи, а зависят только от тока отдаваемого батареей потребителю. Следовательно, при одинаковой мощности проектируемых систем, выгоднее с точки зрения потерь на нагрев, будет система с большим напряжением.
- вес батареи – измеряется в граммах, показатель напрямую связан с мощностью батареи и её емкостью. Ориентировочный вес батареи можно рассчитать по такой эмпирической зависимости:
G = (емкость в ампер-часах) * (токоотдача) * (количество элементов в паке ), г.
Например, батарея 4S1P 4000мА*ч c токоотдачей 25С будет весить порядка 4 * 25 * 4= 400 г.
Вот, пожалуй, главные параметры для батарей, их, как правило, можно найти у фирмы-изготовителя. Также, важно помнить про то, что Li-Po батарее очень критичны к переразрядке и перезарядке, поэтому заряжать их надо только специальными «умными» зарядниками, чтобы не испортить и избежать возгорания! Не стоит забывать так же о производителе, в принципе о качестве батарей можно судить по цене, не стоит гнаться за дешевыми китайскими брендами.
III. Электронный pегулятор cкорости (ESC).
Регулятор скорости служит для управления вращением электрических моторов. В данном случае будет рассмотрен наиболее распространенный регулятор Castel Mamba Monster Max (MMM) для безколлекторных бездатчиковых моторов. Все сказанное ниже, так же справедливо и для других типов регуляторов, если знать все необходимые параметры. Вот основные параметры регулятора МММ:
Как видно, регулятор поддерживает напряжение до 25,9 В, и ток 120 A. При выборе регулятора важно, чтобы его максимальная мощность была больше мощности подключенного мотора, с некоторым запасом, для того чтобы регулятор не сгорел и работал нормально в длительном режиме под нагрузкой. Сам производитель рекомендует использовать регулятор при загрузке в 80% от максимальной пиковой мощности, в нашем случае это 96 А или округлим немного для простоты расчетов ток до 100А. Тогда теоретически максимально возможная мощность подключаемого мотора может быть порядка 2,5 кВт!! Это в теории, но всегда надо руководствоваться здравым смыслом и иметь некоторый запас прочности и надежности. На практике данный регулятор безболезненно работает с моторами 1,5- 1,8 кВт.
Здесь нас также интересует вопрос эффективности и потерь на регуляторе. Рассчитаем их аналогично с расчетом для батарей. И снова закон Джоуля-Ленца:
Qрег = Iц2*Ri*t, (Вт) (4)
Qрег = 100*100*0,0003*1=3 Вт это на одну фазу, соответственно грубо умножим это значение на 3 фазы, получим » 9 Вт. На первый взгляд цифра не большая, но тут мы не учли особенности работы электронных регуляторов, а именно сам принцип работы широтно-импульсной модуляции (ШИМ), применяемой для управления 3-фазными движками. Не будем вдаваться в дебри электронных процессов, скажем лишь, что внутреннее сопротивление фазы, указанное в параметрах регулятора, характеризует сопротивление ключей при полном открытии, когда электронный ключ полностью открыт. На самом деле ШИМ имеет свою частоту открывания-закрывания ключей, а именно в эти переходные моменты сопротивление ключей значительно выше и падения напряжения на них будет больше, соответственно и нагреваться регулятор будет несколько больше. Грубо говоря, учитывая все вышесказанное, примем тепловые потери в регуляторе порядка 15 Вт или 1-2% от номинальной мощности регулятора.
IV. Электродвигатель.
Вот мы и добрались до мотора. Существует масса различных по типу и характеристикам моторов. Приводить их все в рамках данной статья нет смысла, всю информацию можно без труда найти на просторах родного интернета, либо почитав хотя бы форумы на данную тему. Нас в большей степени интересует физика процессов происходящих в моторе, для понимания истинной эффективности и правильного выбора мотора под конкретную задачу. И так, начнем.
Для наглядности приведем таблицу характеристик моторов Medusa 36x60 серии V2:
К основным характеристикам электромоторов относятся:
- Kv – обороты на Вольт, показывает количество оборотов вала двигателя, приходящиеся на 1 вольт питающего напряжения. Одна из основных характеристик мотора, которая важна для правильной конфигурации всей системы изначально. Определяющим здесь является получение максимального количества оборотов вала двигателя при максимальном напряжении в пределах 35000-37000 об/мин. Данный диапазон является оптимальным, не зависимо от Kv мотора! Именно на этой стадии, важно понять для себя, какую конфигурацию батарей (2S, 3S, 4S, 5S, 6S или 10S) вы собираетесь в дальнейшем использовать? Да, именно питающее напряжение будет определять Kv мотора. Крайне не рекомендуется, завышать питающее напряжение относительно оптимального напряжения для данного Kv мотора более чем на 2S! В этом случае, целесообразнее перейти на двигатель с меньшим значением Kv. В противном случае, под вопросом встает надежность механической части привода и управляемость машины на трассе, из-за чрезмерной мощности, подводимой к мотору.
- мощность – Pm (кВт), следующий важный параметр мотора, который нам понадобится при выборе мотора. От него будет зависеть то, как будет ехать наша машина. Как правило, производители моторов приводят номинальную мощность мотора, то есть это та мощность, которую мотор может длительное время потреблять от источника питания без изменения своих динамических характеристик. Проще говоря, та отдаваемая мощность, при которой мотор не перегреется под нагрузкой. Требуемая мощность мотора, в первую очередь зависит от веса машины, чем он выше, тем больше нужна мощность мотора, с другой стороны больший вес модели, приводит к большему удельному давлению колеса на грунт, увеличивая тем самым коэффициент сцепления колеса с покрытием трассы. Поиск этого оптимального соотношения между весом модели и мощностью мотора и является наиболее сложной задачей. На практике мощность мотора подбирается чисто практическим путем. Ниже мы попытаемся рассчитать требуемую мощность для каждого типа машин указанных в начале статьи и соответственно подобрать мощность двигателя.
- I0@8V – ток холостого хода при соответствующем напряжении питания. Также важный параметр, на который следует обратить внимание при выборе мотора. Он показывает потребляемый ток двигателем при постоянном напряжении (Medusa –дает значение тока при 8V, NeuMotors – при 10V) без нагрузки, а значит, данный показатель суммарно характеризует такие показатели мотора как качество намотки обмоток статора, качестве применяемого провода, качестве магнита, качестве подшипников применяемых в двигателе. Чем меньше это значение при прочих равных характеристиках двух моторов, тем лучше. Потери холостого хода могут составлять десятки Вт и будут определяться как:
Qх.х = I0@8V *U0, (Вт) (5)
- внутреннее сопротивление двигателя – Rm (Ом) – параметр, который зависит от конструкции мотора. Чем больше витков в обмотках статора, тем выше внутренне сопротивление двигателя. Соответственно, данный параметр (Rm) напрямую связан с показателем kV (обороты на вольт). То есть, при малом количестве витков в статоре, обмотка будет обладать меньшей индуктивностью, соответственно магнитное поле в такой обмотке будет быстрее появляться и быстрее исчезать, при этом получаем высокие обороты. При большем количестве витков наоборот, индуктивность выше, следовательно, обороты при этом мы получаем меньше, а момент на валу больше. Данный параметр в сочетании с допустимым током эл.двигателя также позволяет оценить количество тепла выделяемое в обмотках статора, а если еще проще - потери полезной мощности на нагрев. И так, рассчитаем эти потери, применив известную уже нам формулу, возьмем для примера двигатель 1500Kv из табл. 5:
Qдвиг = Iдвиг2*Rm*t, (Вт ) (6)
Qдвиг =77*77*0,008*1=47Вт или 5,2 % от номинальной мощности!!!
Итак, мы получили мощность, которая выделится в двигателе в виде тепла при протекании максимального номинального тока через мотор в течении 1 секунды. Много это или мало? С одной стороны это конечно не много, так как в таком режиме мотор работает не постоянно и соответственно при меньшем токе, потери будут меньше. Но с другой стороны 47 Вт это мощность, которую имеет уже довольно мощный паяльник, в электронике вообще применяются паяльники даже меньшей мощностью – в 25 Вт. А если учесть, что в моторе всегда будут нагрузки кратковременно, но превышающие номинальный ток, данный параметр будет еще выше. Поэтому, очень большое внимание следует уделять дополнительному охлаждению мотора, а многие производители, даже указывают, что данная номинальная мощность мотора достигается только при хорошем воздушном потоке через мотор.
Итак, мы рассмотрели все основные составные части электрической системы автомодели, подведем некоторые итоги:
- построение электрической системы привода автомодели должно начинаться с подбора требуемой мощности мотора исходя из желаемой мощности на колесах, мощность регулятора должна быть больше пиковой мощности мотора, а отдаваемая мощность батареи должна быть в пределах номинальной мощности регулятора;
- выбирая конфигурацию всей системы электрического привода, важно понимать, что с увеличением напряжения питания батарей увеличивается общая эффективность системы, выраженная уменьшением потерь мощности в виде рассеянного тепла;
- потери в батареи на тепло в зависимости от режима работы батареи и напряжения питания, могут составлять до 5 % от её мощности или емкости, а это значит, что для батареи емкостью 5000мАч » 200мАч мы потеряем на нагрев батареи, что, безусловно, скажется на времени катания!
- потери на тепло в регуляторе напряжения могут составлять до 15Вт или 1-2% от номинальной мощности батареи;
- потери в двигателе на холостом ходу могут достигать 1% от подводимой мощности;
- потери в двигателе на нагрев могут достигать 50Вт или порядка 5% от номинальной мощности;
- также присутствуют потери в проводниках, которыми при значительных токах, также не стоит пренебрегать и всегда следует стремиться делать как можно короче длину проводов!
Следовательно, общие потери в системе от батареи до выходной мощности на валу мотора можно представить:
P на валу = 100% - Qбат - Qрег - Qх.х - Qдвиг (7)
Таким образом, для того чтобы получить на валу двигателя 1000 Вт мощности, мощность питающей системы должна быть на » 15-20 % больше или 1150-1200Вт.
Вот теперь мы и подобрались к самому сложному, о чем говорилось выше, а именно расчету требуемой мощности мотора, необходимой для конкретной модели с учетом всех неизбежных потерь, которые мы расписали ранее. Попробуем рассчитать данный параметр в следующей главе.
IV. Коэффициент сцепления колес с покрытием.
Для того чтобы рассчитать требуемую мощность нам не обойтись без физики, попытаемся коротко, не вдаваясь в дебри. Итак, почему машина едет? Когда машина стоит (рис.1), колесо давит на грунт с силой F=mg, где m - масса колеса или 4 часть всей машины, g=9,8 м/с2. Земля в свою очередь действует на колесо реакцией опоры – сила N. Все уравновешено, ничего не двигается. При вращении колеса, в точке контакта резины с землей появляется сила тяги Fтяги и сила трения Fтрения. Именно благодаря силе трения машина едет вперед, отталкиваясь от покрытия. Именно сила трения отвечает за то, с каким максимальным ускорением, сможет стартовать машина с места без пробуксовки!!! Это очень важно, так как в случае пробуксовки на колесо начинает действовать уже не сила трения, а сила скольжения, которая значительно меньше. Как определить силу трения и коэффициент сцепления колес с покрытием? Очень просто, можно воспользоваться обычными бытовыми весами или безменом. Прошу не относится скептически к следующим словам, здесь приводится сам принцип эксперимента. Имея, например цифровой динамометр, данные могут быть получены с высокой степенью точности. Итак, нам понадобится безмен и полностью снаряженная машина.
Суть эксперимента показана на рисунке 2, для определения силы трения нам необходимо полностью снарядить машину, и заблокировать все 4 колеса. После этого цепляем динамометр за бампер и равномерно начинаем тянуть машину параллельно земле. При этом фиксируем максимальные показания, которые покажет динаметр, до срыва колес. Для получения значения силы, наши показания необходимо умножить на g=9,8м/с2. Математически выглядеть это будет так:
Fтрения = k ·m ·g, (8)
где, k – коэффициент сцепления, величина безразмерная, показывает, во сколько раз необходимо применить меньшую силу для смещения предмета горизонтально, в сравнении с вертикальной силой, действующей на предмет; m – полная масса машины, кг; g – 9,8м/с2.
Таким образом, имея показания безмена и зная вес машины, можно рассчитать коэффициент трения колес с покрытием:
k = Fтрения | m ·g, (9)
Приведем для ясности практические замеры, имеем трагу весом 4,5 кг, имеем резину ProLine 40 серии, показания безмена до срыва колес в юз дома на керамической плитке - 3,5кг. Следовательно, сила трения Fтр= 3,5*9,8 = 34,3 Н. Учитывая вес машины, вычислим коэффициент трения: k = 34,3 / (4,5*9,8) =0,77; аналогично на укатанном снегу – k = 0,45; на грунтовом покрытии k = 0,65.
Подобным образом, можно определить коэффициенты сцепления колес с покрытием для любой машины, зная её вес и измерив силу трения. Данным методом можно качественно сравнивать параметры сцепления различных колес для одного и того же покрытия.
Что нам дает коэффициент трения? С его помощью мы сможем оценить максимальное ускорение машины относительно покрытия, которое мы сможем достигнуть. Запишем это так:
Fтрения= F тяги или k·m·g = m·a или k·g = a (10)
То есть видно, что максимально ускорение, которое мы можем достигнуть для модели, не зависит от веса, а зависит только от коэффициента сцепления колес с покрытием, или простым языком зависит только от типа используемой резины и покрытия трассы. Поэтому выбор резины для соответствующего покрытия, является очень важным элементом общего успеха. Говоря о практических цифрах, максимальное ускорение в зависимости от типа покрытия и используемой резины может быть в пределах от а = 4,4 - 7,5 м/с2. А как же масса машины спросит читатель? Масса машины, как раз и будет влиять на требуемую мощность, которую необходимо подвести к колесам, чтобы обеспечить нужное ускорение модели.
Чтобы не загружать читателя, громоздкими расчетами, приведем только расчет для багги весом 3,7кг, для остальных моделей приведем только результаты. Итак, начнем.
Момент на 4-х колесах описывается следующей формулой:
4 Мкр = 4Fтр*Rколеса + 4Jколеса*а /Rколеса, Н/м (11)
где, Fтр – сила трения колеса об покрытие, Н;
Jколеса – момент инерции колеса при его раскручивании, кг*м2;
Rколеса – радиус колеса » 0,058, м;
a =7,5 - ускорение движения модели, м/с2;
Силу трения мы уже находили выше: 4Fтр = k·m·g = m·a= 27,75 Н, то есть это суммарная сила, которая может быть приложена к 4-м колесам для придания ускорения модели 7,5 м/с2 без пробуксовки колес.
Момент инерции 4-х колес при их раскручивании равен:
4 Jколеса = 4 · mколеса · R2колеса = 4· 0,2·0,0582=0,0027 где, mколеса = 0,2 кг.
Таким образом, общий момент для раскручивания 4-х колес и придания модели ускорения 7,5м/с2 будет равен:
4 Мкр = 27,75 ·0,058 + 0,0027 · 7,5/ 0,058 » 1,7 Н/м
А теоретическая сила тяги, которая должна быть на валу мотора равна:
Fмотора = 4 Mкр / Rколеса = 1,7 / 0,058 = 29,3 Н (12)
А как мы знаем, мощность - это работа, выполненная за определенное время, следовательно, теоретическая мощность двигателя необходимая для перемещения модели без пробуксовки колес составит:
Pтеоретич = A / t = Fмотора · L / t = 29,3 ·7,5 / 1 » 219,8 Вт, (13)
где, L = 7,5 м – это путь, который проедет модель за 1 сек при ускорении 7,5м/с2.
Учитывая потери в трансмиссии, примем h = 0,96%, тогда мощность на валу должна быть не меньше:
Pвал = Pтеоретич / h = 219,8 / 0,96 » 230Вт !!! 4)
Проведя аналогичные расчеты, но для моделей соответствующего веса и диаметра колес получим следующие данные, табл. 5
И так, мы видим, что теоретическое значение расчетной требуемой мощности привода не превышают 350 Вт и этот расчет сделан для ускорения а=7,5 м/с2, а это согласитесь не маленькое значение. А при движении с установившейся скоростью, мощность вообще затрачивается только на преодоление сопротивления качению, а это значение на порядок ниже, чем требуется мощность при резком ускорении. И снова пытливый читатель попытается найти ошибку в расчетах, так как реальные установки в жизни, имеют значительную мощность (1-1,5 кВт!!!) Невольно возникает вопрос - как же так? И все-таки, автор считает, данный расчет очень близким к реальности. Судите сами, если взять мощность для супер-монстра 343Вт и рассчитать средний ток для этой мощности для напряжения 14,8В, то получим 343 / 14,8 » 23,2 А, следовательно имея батарею 5000мАч, мы получим время катания в спортивном режиме около 13 минут, ну согласитесь цифра очень близкая к фактическим замерам. Конечно, какой-то запас необходимо иметь в любом случае, но имея мотор мощностью 1,5 кВт на модели весом 4,5 кг, вся избыточная мощность, а с ней и лишний вес, будет уходить в бессмысленное раскручивание колес и пробуксовке, либо при высоком коэффициенте сцепления просто переворачивании машины на месте. Так что решать только Вам!
Ну и в заключении подведем итог всему сказанному.
- Целью данного расчета, была попытка оценить необходимую мощность силовой установки для моделей разного класса.
- Не стоит стремиться к безразмерной мощности силовой установки, что чревато механическими поломками трансмиссий модели и пропорционально мощности увеличению веса всей модели, а также неуправляемого поведения модели на трассе.
- Избыточная мощность не дает значительного преимущества при разгоне и ускорении, так как решающую роль играет коэффициент сцепления колеса с покрытием! Для получения преимущества на трассе наиболее важно правильно выбирать тип колес под соответствующее покрытие, что даст максимальное сцепление и ускорение модели.
- Для экономии емкости батареи важно научится пользоваться «накатом» модели и использовать тормоза только в крайнем случае.
- С учетом некоторого запаса по мощности, а также с учетом плохого обдува мотора в закрытом корпусе, для модели весом 3,5-3,7кг можно рекомендовать мотор мощностью 900Вт, весом 4,5кг – 1100Вт, весом 5,5кг – 1300Вт.