А теперь давайте рассмотрим, каким образом осуществляется механизм ходьбы человека, дабы выявить скрытые ресурсы этого механизма, которые можно использовать для расширения возможностей перемещений в единоборствах.
Будучи взрослыми, мы не задумываемся о том, что нужно сделать, чтобы пойти. Встали и пошли. Но ведь когда-то, в детстве, на освоение этого, казалось бы, простого навыка, потребовалось немало времени. Известный советский психофизиолог Н.А. Бернштейн полагал, что формирование основных координационных механизмов ходьбы ребёнка завершается к пятилетнему возрасту, и в то же время отмечал, что окончательное оформление «взрослой» структуры ходьбы происходит значительно позже десятилетнего возраста. Очевидно, объясняется это тем, что несмотря на внешне кажущуюся простоту, ходьба есть достаточно сложное с точки зрения координации действие, в котором, следуя определенному алгоритму, задействуется большое число мышц тела.
С точки зрения биомеханики процесс ходьбы достаточно хорошо изучен. И амплитудные и фазовые характеристики движений частей тела при ходьбе описаны в мельчайших подробностях. Но в данном случае нас интересует не то, что происходит при реализации механизма обычной ходьбы, а потенциальные возможности этого механизма, которые в обычной жизни не используются. Поэтому не будем углубляться в детали, а обратим внимание на следующее.
Если мы понаблюдаем за спокойно идущим человеком, то заметим, что наиболее амплитудные движения выполняют ноги, что вполне естественно. Корпус при этом (в такт шагам) совершает небольшие вращательные движения влево-вправо, в той или иной степени передавая эти движения на руки, и на первый взгляд создается впечатление, что он вертикален. Но если же присмотреться повнимательнее, то мы обнаружим, что это не совсем так.
В фазе завершения переноса веса тела на ногу, которая была вынесена вперёд для выполнения очередного шага, корпус идущего человека оказывается в слегка наклоненном положении в направлении его движения, и принимает вертикальное положение в фазе начала выноса другой ноги, при выполнении следующего шага (рис. 1 а,б). Таким образом при ходьбе наблюдается малоамплитудное колебательное движение корпуса в вертикальной плоскости. Но совершается оно не за счёт сгибательно-разгибательных движений в пояснице, а можно сказать, по чисто геометрическим причинам. При завершении очередного шага, в фазе, когда выставленная вперёд нога, коснувшись земли пяткой, встанет на полную ступню, нога, расположенная сзади и готовая к следующему шагу, касается поверхности земли лишь носком (рис. 1 а). То есть, две стороны условного треугольника, образуемые ногами рассматриваемого человека, в данный момент оказываются не равны, что и вызывает наклон корпуса.
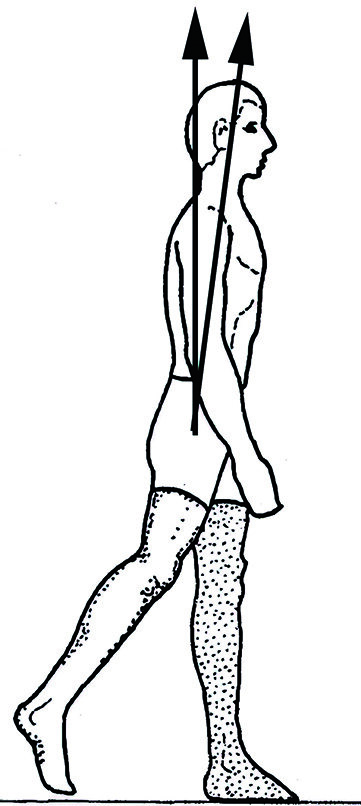
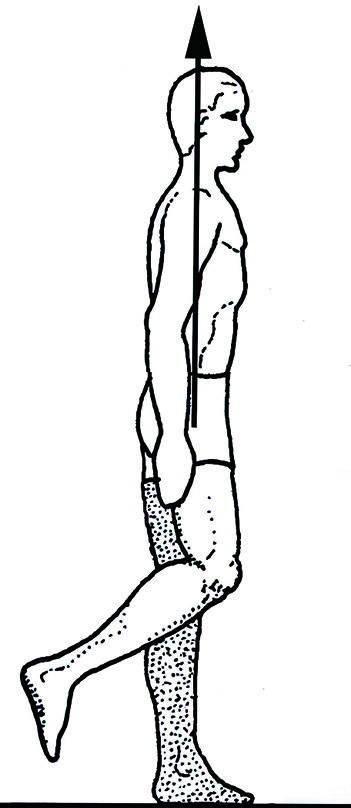
Выравниваться корпус начнёт в фазе выноса стоящей сзади ноги для выполнения следующего шага (рис. 1 б).
При спокойной ходьбе амплитуда наклонов корпуса незначительна. Поэтому кажется, что никаких других движений, кроме небольших поворотов вокруг вертикальной оси, корпус не выполняет.
Автором отмечено, что при анализе раскадровок, демонстрирующих фазы движения человека при ходьбе, в большинстве случаев эти незначительные ритмичные наклоны корпуса не отмечаются. Очевидно, на основании того, что для понимания механизма ходьбы они не считаются существенными.
Но мы полагаем, что навык точного управления наклоном корпуса является весьма важной составляющей механизма передвижения человека, и закладывается он в раннем детстве.
Если посмотреть на попытки малыша сделать свои первые шаги, то можно заметить следующее. Поначалу он слишком сильно наклоняет корпус вперёд, и сделав шаг или два, как правило, падает на четвереньки (рис. 2).
Но постепенно малыш всё дольше удерживается на ногах, в конце концов все эти пробы и ошибки заканчиваются тем, что где-то в подсознании ребёнка «записываются данные» об оптимальном положении корпуса, позволяющем уверенно передвигаться на двух ногах.
А что будет, если в положении стоя мы слегка отклоним корпус назад? Конечно же, в какой-то момент, чтобы не упасть, нам придётся выставить назад ногу, а затем другую, и получится то, что называют «ходьба спиной вперёд». В большинстве случаев двигаться шагами назад человеку не очень-то удобно. Очевидно потому, что данный навык не так уж часто необходим, и поэтому недостаточно развит.
А теперь давайте посмотрим, что будет в случае, если начать ходьбу в фазе очередного шага, когда нога вынесена вперёд, но на неё ещё не перенесен вес тела, отклонить корпус назад. Мы ощутим, что теперь нас потянуло в обратном направлении (рис. 3).
Для того, чтобы не упасть, мы инстинктивно выставим ногу назад. Двигаться задом мы будем до тех пор, пока не изменим положение корпуса, наклонив его вперёд. В зависимости от степени наклона мы либо остановимся, либо снова придётся сделать шаг вперёд.
Поясним, почему отклонение корпуса вынуждает нас начинать делать шаги.
При стоянии, когда корпус вертикален, проекция центра тяжести находится внутри площади опоры, и как мы отмечали в предыдущей части статьи, тело в данном случае удерживается в вертикальном положении за счёт действия физиологических механизмов управления равновесием (рис. 4 а).
При отклонении корпуса свыше определённой величины проекция центра тяжести выходит за пределы площади опоры. В результате этого возникает вращательный момент, обусловленный действием силы тяжести, который стремится опрокинуть тело в направлении его наклона (рис. 4 б). Это и заставляет нас шагать.
Из вышесказанного можно сделать важный для нас вывод. Отклонение корпуса от вертикали позволяет инициировать движение шагом. А изменение направления наклона изменяет направление движения.
Мы коротко коснулись теоретических основ, описывающих механику стояния и ходьбы человека.
И теперь это позволит показать, как из обычных шагов рождаются отчасти необычные движения, которые кардинально расширяют возможности бойца в поединке.
Александр Половинкин
Москва, Россия