Всем привет!
Начало темы про вездеход тут.
Изначально вездеход был запланирован как самобытная игрушка, из грязи и палок. Но что-то пошло не так, скорей всего лень взяла верх и часть деталей отпечатал на 3Д принтере в частности катки для гусеницы. На данный момент есть идея изготовить эти катки из крышек от бутылки из под молока. По диаметру вполне подойдет. Но об этом в другой раз.
По каркасу тоже не стал заморачиваться, да и детям потом будет проще собрать и даже пофантазировать на тему кузова или обвеса. Поэтому достал свой старый железный конструктор и сделал основу из него. Иначе пришлось бы все это колхозить и искать материалы для изготовления. Но мы отвлеклись от темы беседы.
Радиоуправление будет сделано на базе того что есть, а есть у нас китайские машинки с пультами (и без). Те что у меня, передают сигнал на частоте 27 МГц. Естественно есть и другие варианты, но мы их рассматривать пока не будем.
Как устроен пульт такой машинки? У большинства пультов не осталось корпусов, поэтому буду показывать только платы.
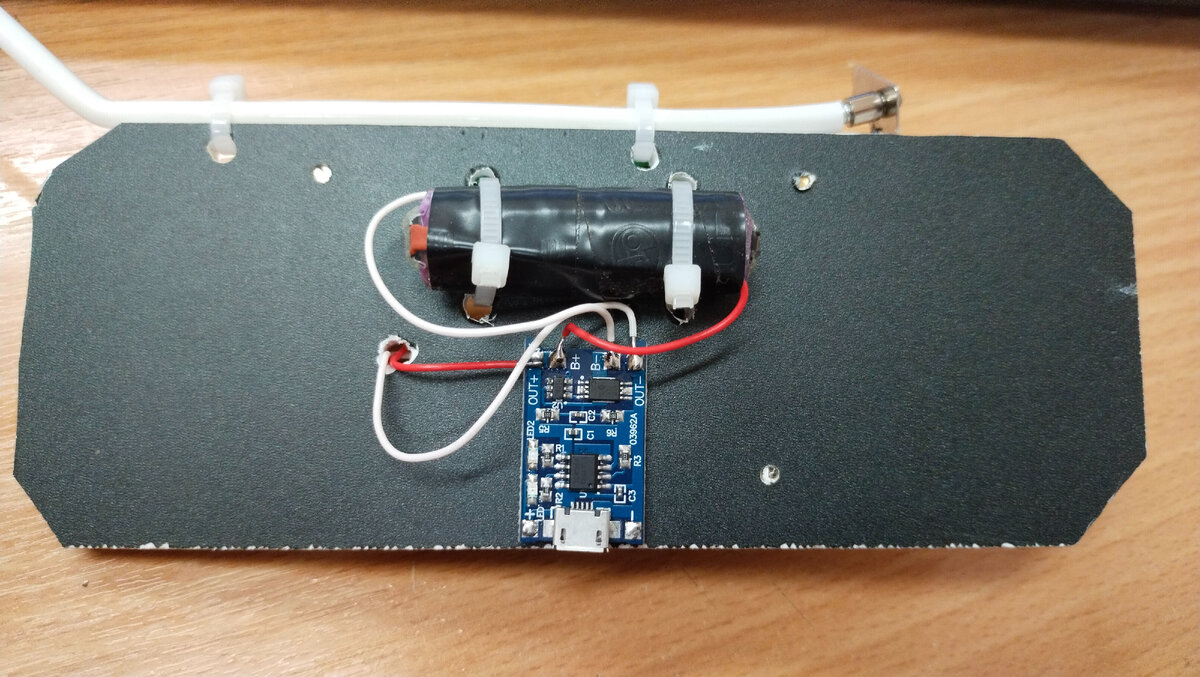
Итак, вариант номер раз. Этот пульт был собран на куске пластика (что-то типа пластика для откосов на окнах), установлен аккумулятор и зарядка с BMS, так как аккумулятор идет без оной в комплекте. На фото представлен первый вариант, где светодиод показывающий на включение питания, вынесен наружу. Потом он был встроен на плату, чтобы не выглядело так убого. На лицевой стороне печатной платы красуется надпись JR-440TX. Также есть таблица, с указанием рабочей частоты передатчика - 27 МГц.
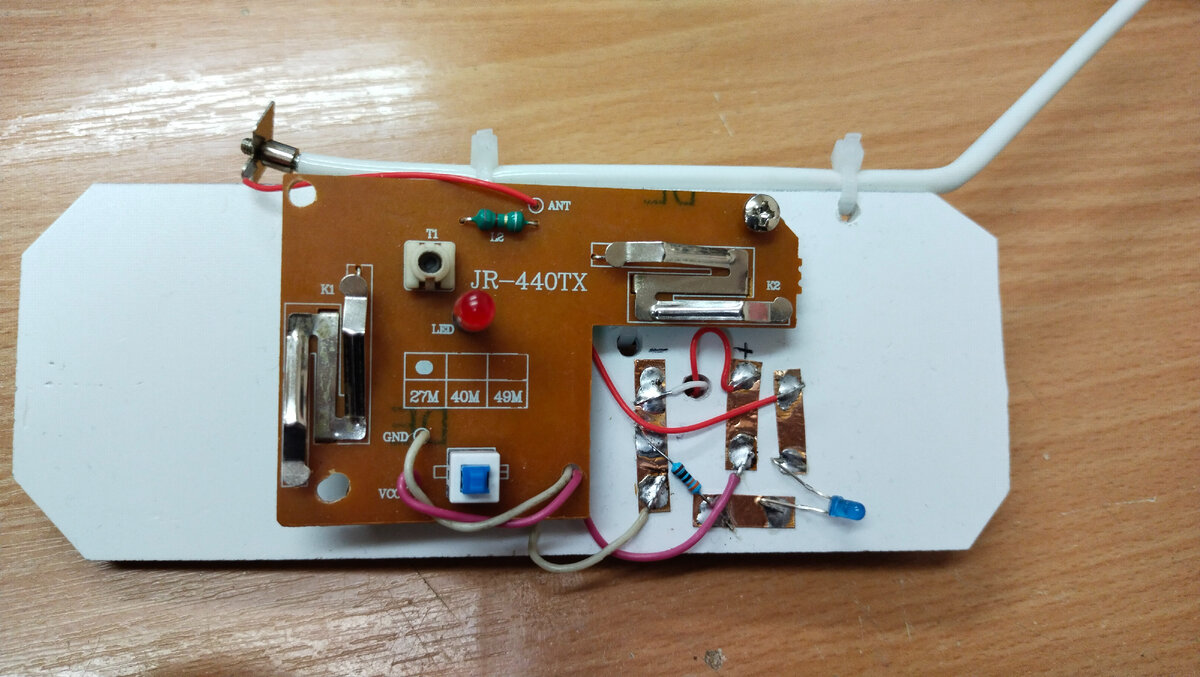
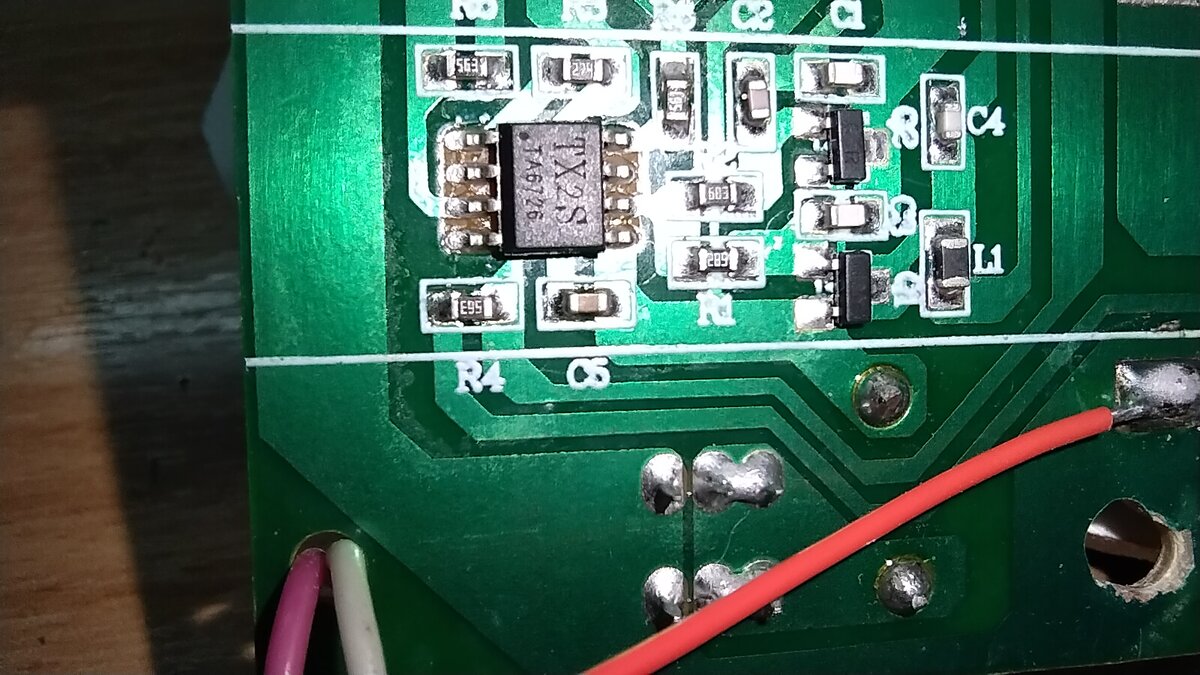
За кодирование команд отвечает 8-ногая микросхема TX2S TA6726. Далее то, что она закодировала, подается на передатчик. Даташит на неё не нашел. Во всех документах речь идет о 14-ногой микросхеме с тем же наименованием. Видимо у нас, что-то типа урезанного варианта.
Вариант номер два. На этот раз в заводском корпусе. Работает на двух батарейках типа АА. Вскрываем корпус и смотрим что к чему. Надпись на лицевой стороне платы YK-2238T, ну и еще какие то надписи помельче.
Работает также на 27 МГц. Микросхема тоже на 8 ног, маркировка TX2S ZYK08Z. Схема почти та же самая, за исключением того, что передатчик кварцованный. Кварц на 27,768 МГц.
Вот здесь есть полезная статья про работу приемника и передатчика. Там обе микросхемы на 14 ног.
Переходим к приемникам. Их у меня тоже несколько штук. Покажу два из них. Все они так же извлечены из радиоуправляемых игрушек, поэтому никаких корпусов нету.
Вариант номер раз. Плата под именем XN-1761R. Все выводы подписаны, куда моторы, куда питание не перепутать. Отдельного драйвера двигателей нет, он встроен в микросхему дешифратор. Микросхема промаркирована MX1608RX2.
На данную плату даже есть схема.
Вариант номер два. Плата под маркировкой JR-416RX. На плате появились электролитические конденсаторы по питанию, что уже неплохо. Машиной управляют уже две микросхемы, отдельно дешифратор, отдельно драйвер двигателей. Дешифратор на 14 ног, промаркирован как RX2. Драйвер двигателя промаркирован как MX1508. На плате так же подписаны выходы и входы. На плате есть два места под SMD диоды, но их нет. Видимо это диоды для защиты от противо ЭДС, при смене вращения двигателей.
Характеристики на драйвер MX1508:
Напряжение питания модуля 2 - 9,6 В
Входное напряжение сигнала: 1,8- 7 В
Ток для одного канала: 0,8 А
Пиковый ток: до 2,5 А
Что же по итогам мы имеем? А имеем мы следующее. Все указанные приемники и передатчики видят друг друга без всяких танцев с бубном. Но есть большое НО! Дальность связи очень мала. Буквально метр, полтора. Есть подозрение, что нужно использовать антенны той длины которые были установлены на машинах. Хотя возможно есть еще что-то, о чем я пока не в курсе.
Если у вас есть какие-нибудь идеи по улучшению качества и дальности связи на этих платах, милости прошу в комментарии.
Продолжение следует....