Взаимодействие человека и робота (HRI) представляет собой проблему для искусственного интеллекта (AI). Он лежит на перекрестке многих поддоменов и, по сути, требует их интеграции: моделирование людей и человеческого познания; приобретение, представление, манипулирование в удобной форме абстрактными знаниями на уровне человека; аргументируя это знание для принятия решений; в конечном счете, воплощение этих решений в физические действия как разборчиво, так и в координации с людьми. Множество техник искусственного интеллекта являются обязательными, от визуальной обработки до символических рассуждений, от планирования задач до теории построения ума , от реактивного контроля до распознавания действий и обучения.
В этой статье делается попытка организовать его в последовательный вызов для искусственного интеллекта, а также объяснить и проиллюстрировать некоторые из путей, которые мы исследовали на наших роботах, что приводит к набору целенаправленных, ориентированных на знания, программных компонентов, предназначенных для человека - взаимодействие роботов.
Сосредоточенность на конкретном классе взаимодействий: совместная задача человек-робот, поддерживаемая мультимодальной и локализованной коммуникацией. (рисунок 1) иллюстрирует этот контекст: человек и робот совместно используют общее пространство и обмениваются информацией с помощью нескольких модальностей (мы особенно учитываем словесное общение, жесты и социальные взгляды), и ожидается, что робот достигнет интерактивного управления объектами, извлечения и переноса задач и других аналогичные обязанности по дому, принимая во внимание на каждом этапе намерения, убеждения, перспективы, навыки своего человеческого партнера. А именно, робот должен уметь распознавать, понимать и участвовать в ситуациях общения, как явных (например, человек обращается к роботу в устной форме), так и неявных (например, человек указывает на объект); робот должен быть способен принимать участие в совместных действиях, как проактивно (планируя и предлагая в результате планы человеку), так и реактивно; робот должен быть в состоянии двигаться и действовать в сейфе.
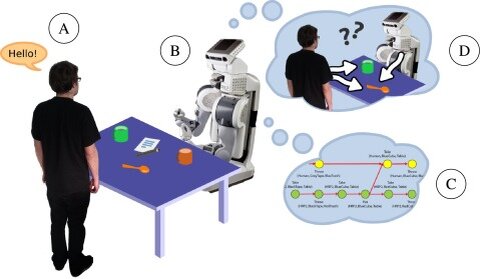
Рисунок 1. Робот рассуждает и действует в домашних сценариях взаимодействия. Источниками информации являются мультимодальный диалог (А) и перспективный мониторинг окружающей среды и деятельности человека (Б) . Робот должен адаптировать свое поведение в режиме онлайн путем объединения вычисленных планов (C) с реактивным контролем. Робот явно обосновывает тот факт, что он (или нет) наблюдается человеком. Рассуждение и планирование осуществляются как на символическом, так и на геометрическом уровне, и учитывают убеждения, перспективы и возможности агентов (D) по оценке робота.
Эти три задачи: общение , совместные действия , выполнение с учетом потребностей человека, структурируют исследования взаимодействия человека с роботом. Их можно понять с точки зрения когнитивных навыков, которые они поручают. Совместное действие , например, строится из:
- Совместная цель , которая была ранее установлена и согласована (обычно путем диалога);
- Физическое окружение, оцениваемое с помощью возможностей экстероцептивного зондирования робота и дополненное выводами, сделанными из предыдущих наблюдений;
- Состояние убеждения, которое включает априорные знания здравого смысла и ментальные модели каждого из задействованных агентов (робота и его партнеров-людей).
Контроллер робота (с помощью планировщика задач) решает, какое действие выполнить следующим , и кто должен его выполнять, от робота или человека (или обоих в случае совместного действия, такого как передача обслуживания, как это должно быть достигнуто и какие сигналы должны восприниматься и / или генерироваться роботом для облегчения совместных действий человека с роботом . Это наконец контролирует и контролирует его выполнение. Операция продолжается до тех пор, пока цель не будет достигнута, объявлена недостижимой или оставлена человеком.
Это выражается в нескольких навыках принятия решений, планирования и представления, которые должны быть доступны роботу . Он должен уметь:
1) Представлять и манипулировать символическими состояниями убеждений.
2) Приобретать и поддерживать их в актуальном состоянии в соответствии с состоянием мира и поставленной задачей.
3) Создавать и итеративно улучшать общее (человек-робот)
4) Планирует создавать и выполнять действия, которые он должен выполнять, и наоборот, отслеживать действия, достигнутые его партнером-человеком.
Продолжение следует...



















