На сегодняшний день основное внимание исследовательского сообщества сосредоточено на автономных роботах, которые будут работать в немодифицированной среде. Цель состоит в том, чтобы позволить роботу, как и человеку и другим животным, выполнять все расчеты, размышления и предоставлять выбор действий.
Вычисления широко распространены, когда вычислительные устройства распределены и незаметно встроены в объекты повседневной жизни. Эти устройства чувствуют свое окружение, автоматически соединяются друг с другом для формирования сетей датчиков, обмениваются информацией и действуют для изменения своего окружения.
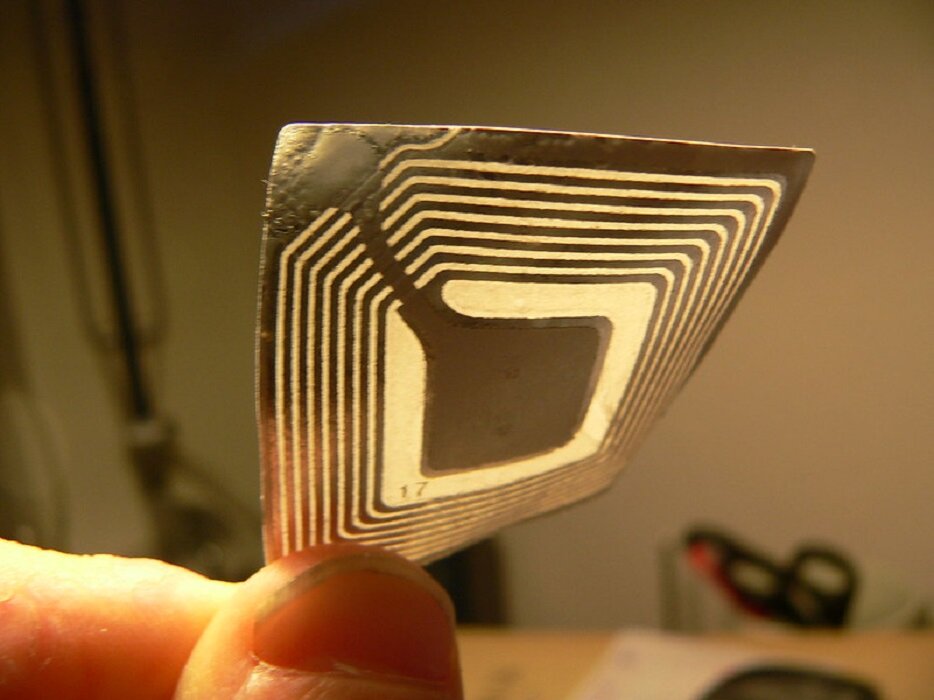
Они варьируются по сложности - от простых встроенных датчиков до традиционных автономных мобильных роботов. Например, в кухне, оборудованной датчиками, шкафы "знают", что внутри них, потому что объекты помечены радиометками RFID (Radio Frequency IDentification), а шкафы оснащены считывателями RFID меток. Робот, задачей которого является найти и взять кофейную кружку, может извлечь большую пользу из доступа к информации о содержимом шкафов.
Если рассматривать будущее сервисной робототехники, то представляется вероятным, что сервисные роботы будут компетентными и универсальными агентами в операционных средах, оснащенных датчиками и эффекторами, а не автономными и изолированными структурами.
Следуя этой парадигме, робот может подключаться к сети датчиков и исполнительных механизмов своей рабочей среды и использовать эти датчики, как свои.
Повсеместная роботизация - перспективный путь к созданию автономных служебных роботов, поскольку сенсорные и компьютерные сети могут существенно улучшить восприятие роботов и возможности управления ими.
- Датчики специального назначения. Вместо того, чтобы полагаться на датчики общего назначения, такие как камеры и лазерные сканеры, сети датчиков позволяют определять датчики для решения конкретных задач.
- Восприятие мероприятий высокого уровня с небольшим объемом данных. Специальные датчики генерируют очень низкий объем данных датчиков и генерируют события, тесно связанные с задачами робота. Например, распространенная робототехника может распознать, что люди едят по чашкам и тарелкам, которые исчезают из шкафа и появляются после этого на столе.
- Понимание повседневной деятельности. Датчики в сети позволяют вездесущим роботам наблюдать за деятельностью очень надежно и всесторонне в течение длительного периода времени. Наблюдение за деятельностью может осуществляться на разных уровнях абстракции. Робот может распознавать действия, интерпретируя внешний вид и исчезновение объектов в местах, имеющих отношение к задаче, или сегментируя непрерывные движения на отдельные подзадачи.
- Распознавание объектов. Распознавание и локализация объектов может быть значительно упрощена благодаря маркировке уникальными идентификаторами объектов, имеющих отношение к решению конкретных задач, и распознаванию этих идентификаторов с помощью считывателей меток RFID.
- Усиление сигнала. Поскольку датчики в сети территориально распределены, робот может использовать их для компенсации ограничений своего бортового сенсорного оборудования. Сеть датчиков позволит роботу лучше выполнять совместную работу по дому, например, накрывать стол вместе с человеком.
Однако для того, чтобы обеспечить эффективные исследования в области робототехники, роботизированные системы управления нуждаются в дополнительных возможностях, в частности, на уровне межплатформенного программирования.
По сравнению с развертыванием единого автономного робота с однородной программной инфраструктурой, повсеместная робототехника имеет дело с наборами датчиков и эффекторов на порядки больших размеров. Эти датчики и эффекторы должны быть использованы в качестве ресурсов для робота.
Для этого необходим не только обмен данными, но и то, чтобы робот мог понять значение данных, передаваемых датчиком, чтобы использовать этот датчик в качестве ресурса.
Только после того, как робот обнаружил, что соответствующий RFID-считыватель установлен в конкретном шкафу, он может использовать датчик для определения объектов, находящихся в этом конкретном шкафу.
Другие проблемы повсеместной робототехники включают неоднородность аппаратной и программной инфраструктуры, необходимость синхронизации и слияния данных датчиков, а также требуемое время безотказной работы и надежность датчиков и эффекторов в сети.
В то время как большинство исследователей придерживается монолитного подхода, при котором все измерения, управления и вычисления выполняются на борту робота, разрабатывается вездесущая парадигма робототехники, в которой робот является лишь частью сети датчиков, исполнительных механизмов и компьютеров. Используя эти другие устройства, робот может выполнять более сложные задачи, не становясь слишком сложным и дорогим.
Это хороший подход к разработке и внедрению передовых сервисных роботов, которые могут выступать в качестве роботов-помощников с широкими возможностями манипулирования и работать в среде, оборудованной датчиками.



















