Космос и его освоение всегда были движущей силой науки и научных разработок. Роботизированные системы позволяют исследовать отдаленные уголки Солнечной системы и используются в качестве предвестников полетов человека. Проектирование систем для внеземных операций является сложной задачей.
Для того чтобы функционировать в космосе, необходимы подсистемы робота, от электроники до механики, сенсоры и планирование для безупречной и согласованной работы.
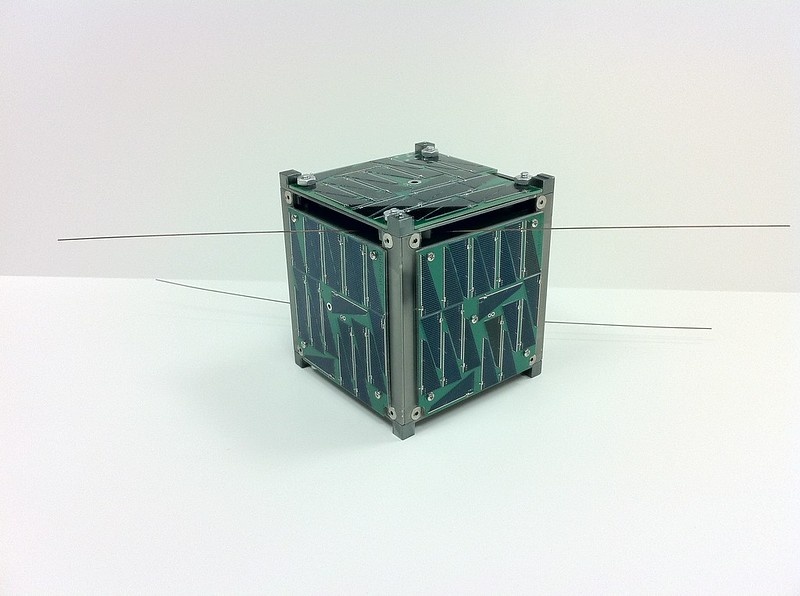
Проектируется робот CubeSat, который может прыгать по лунной поверхности. Чем выше точка обзора, тем больше места запечатлено на снимке для визуальной реконструкции и планирования лунной поверхности.
Сложности возникают как при ограничении полезной нагрузки платформы, так и при ограничении пусковой нагрузки. Ограничения по массе и производству обусловлены ограничениями по подъему и стоимости, связанными с имеющимися ракетами-носителями. Космические аппараты, также имеют определенную геометрическую форму, оставляя пустые полости внутри ракеты-носителя.
Это делает форм-фактор Cubesat особенно привлекательным, позволяя заполнять неиспользуемые пространства и создавая возможности компаний летать с полезной нагрузкой.

Проектирование системы
Механическая система робота имеет решающее значение для этого проекта, позволяя кубу перемещаться по лунной поверхности, захватывая цифровые изображения по мере их изучения.
Эта механическая система состоит из рамы куба, самостоятельного механизма, фотоэлектрической системы и системы прыжков.
Съемка лунной поверхности также является одним из основных требований проекта, поскольку эти снимки редкие и оригинальные сами по себе, также могут оказаться ценным ресурсом для исследования Луны при использовании для восстановления лунного ландшафта.
Рама куба
При проведении первоначальных испытаний была изготовлена рамка размером 100x100x100 мм с использованием технологии 3D-печати. Это позволило быстро разработать раму для тестирования, обеспечив при этом прочность крепления камер. Вторая рама была построена из алюминиевых балок 80x10x10мм, с угловыми элементами размером 10x10x10мм, удерживающими конструкцию вместе. Эта рама более прочная и выдерживает удары о твердую поверхность на расстоянии.
Толкающая пластина
Толкающая пластина была разработана для работы на мягкой поверхности, требующей большой площади контакта с поверхностью. Разработана плита, состоящая из плоского основания размером 94x94 мм, с выступающими частями, которые минимизируют скольжение и увеличивают тяговое усилие.
Самостоятельный механизм
После того, как робот-куб завершил свой прыжок и покоится на поверхности Луны, его необходимо переместить в правильную ориентацию, чтобы быть готовым к следующему прыжку.
Рассматривались такие системы, как реакционные колеса, но они требовали слишком много места и мощности. Была выбрана система состоящая из четырех квадратных солнечных батарей размером 100×100 мм, смонтированных на четырех сторонах куба, чтобы каждая из них могла поворачиваться на 90 градусов. Все четыре стороны управляются одновременно одним двигателем, хотя для резервирования может быть добавлен дополнительный двигатель.
У робота хранится резервная батарея, способная подавать питание на бортовые компьютеры, когда куб не подвергается воздействию солнечного света или во время прыжка.
Механические системы
Хорошо спроектированная рама куба имеет важное значение, поскольку в ней размещена полезная нагрузка и все бортовые компьютеры. В сочетании с эффективным механизмом, аппаратное обеспечение должно быть надежным и иметь множество избытков.
В случае серьезного сбоя в работе самостоятельной системы и лишения солнечных элементов солнечного света, бортовой аккумулятор позволяет кубу продолжать работу в течение определенного периода времени для передачи собранных данных.
Бортовые камеры
Для успешной экспедиции на Луну система технического зрения должна быть способна получать снимки, содержащие ценную информацию о ландшафте и рельефе.
Две идентичные камеры в стерео конфигурации устанавливаются внутри кадра лицевой стороной вниз для сбора изображений. Самые интересные снимки осуществляются во время прыжка, но из-за этого движения предъявляются очень строгие требования к системе восприятия.
В частности, камеры должны хорошо работать при быстром ускорении без чрезмерного смазывания движения. Для первоначальных разработок, глобальные камеры PointGrey FireFly предоставляют изображения в оттенках серого (из-за того, что лунный пейзаж в основном монохроматический). Для воспроизведения изображений и минимизации размытости было установлено минимальное возможное значение экспозиции при сохранении достаточного освещения для достижения соответствия характеристик.
Механические пружинные системы имеют значительные преимущества по сравнению с электромагнитными системами, такие как вес и потребляемая мощность.
Предлагаемая система технического зрения включает в себя пару камер для получения многокадровых данных лунной поверхности. Успех системы технического зрения на борту судна свидетельствует о том, что использование нескольких камер и многокамерного компьютерного зрения дает ценные данные для (роботизированной) разведки.
Это особенно полезно для других наземных средств, например, для плавания за горизонтом, планирования маршрутов в труднодоступных местах, а также для исследований Луны человеком.



















