Введение
С момента появления автомобиля, инженеры стремились упростить его эксплуатационные свойства и сделать вождение безопасным. С каждым годом, транспорт становился все проще в управлении. С увеличением технологичности и уменьшением размеров вычислительных машин стало возможным использование электронных систем в транспортных средствах. С каждым годом технологии в области электроники развивались, и нам стали доступны системы, позволяющие эффективно тормозить, контролировать скорость и дистанцию, помогающие парковаться, рекуперировать энергию и т.д. На данный момент активно развиваются технологии связанные с электронным управлением. В отличие от гидравлических систем, которые сейчас широко используются, электронные значительно дешевле, так как они автономны и не требуют дополнительных насосов и шлангов, так же эта система позволяет экономить энергию, включаясь и выключаясь только в нужный момент. Еще одно преимущество электронного управления в том, что оно позволяет использовать больше параметров, например, инженеры могут с помощью программного обеспечения изменить зависимость угла поворота рулевого колеса от угла поворота колес, или запрограммировать его так, что параметры будут меняться в зависимости от условий эксплуатации автомобиля, что бы на большой скорости чувствительность руля была меньше, во избежание резких поворотов на большой скорости, а на маленьких больше, для обеспечения быстрого маневрирования. В автомобильной промышленности они реализовались в виде системы под названием «drive by wire» или «электропривод рулевого управления».
Drive by wire - технология, которая подразумевает замену некоторых механических узлов рулевого управления автомобилем электронными. Водитель управляет бортовым компьютером, а не непосредственно автомобилем. Компьютер исполняет команды с учётом показаний датчиков, включая-выключая сервомоторы.
Сейчас данная система серийно применяется только компанией Nissan. С 2013 года она оборудует люксовые версии Infinity проводным рулевым управлением.
На данный момент ведутся доработки по введению системы распознания человека или машины, находящихся в непосредственной близости от вашего автомобиля. По идее, система не позволит Вам приблизиться на небезопасное расстояние к объекту. Одновременно с звуковым сигналом, оповещающем об опасности, на ветровом стекле перед водителем высвечивается безопасное направление, по которому нужно следовать. В случае заблаговременной реакции водителя, звуковой сигнал прекратиться, в случае отсутствия реакции – система сама уводит машину от столкновения.
Прогрессу в автомобильной электронике будет способствовать то, что в настоящее время наблюдается некоторое замедление роста потребления на компьютерном рынке, поэтому многие производители традиционного аппаратного и программного обеспечения для компьютеров переключили свое внимание на автомобильный рынок.
Система электродистанционного управления в перспективе позволяет избавиться автомобилю от некоторых органов управления, многократно увеличить подкапотное пространство и салон, повысить комфорт и сделать автомобиль автономным.
По большому счету изобретение «drive by wire» – очередной шаг к созданию беспилотных транспортных средств, таких как Google автомобиль, умеющих ездить самостоятельно. Google тестирует самоуправляемые автомобили в течение нескольких последних лет. В таких машинах применяется технология искусственного интеллекта, данные от онлайн-карт Google Street View, видеокамеры и ряд датчиков. Для тестов Google использует модели Toyota Prius и Audi TT, которые проехали свыше 250 тысяч километров с ограниченным вмешательством человека и больше 1 тысячи 600 километров без его участия.
В конце 2011 года Google получила патент на «умные» автомобили. В частности, в документе описываются несколько наборов датчиков. Первый позволяет автомобилю узнать, когда управление нужно взять на себя, а второй - определить, где он находится и в каком направлении следует ехать. Такие автомобили, например, смогут самостоятельно доехать в сервисный центр или использоваться в туристических местах.
1. Структура электронного привода управления
1.1.Электропривод рулевого управления с отказоустойчивым механизмом-муфтой
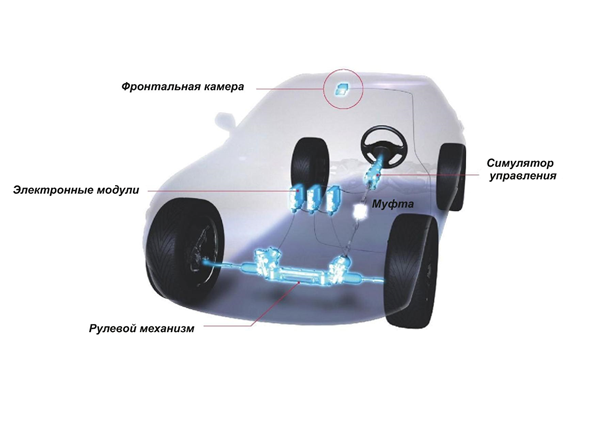
Электронная цифровая система состоит из:
· Фронтальной камеры
· Электронных модулей
· Симулятор управления
· Рулевого механизма
· Муфты
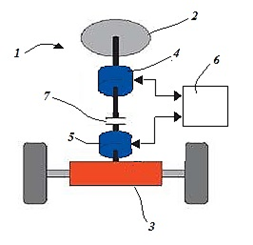
Вместо механической связи «руль-колесо» используется электронная. Поворот колеса 2, реализуемое рулевым механизмом 3, которое управляется электромотором 5, управляется электронным модулем 6 в зависимости от угла поворота рулевого колеса, и симулятор 4, также управляемый модулем 6, передает реакцию к рулевому колесу 2.
1.1.1. Назначение элементов электропривода рулевого управления
Используемая фронтальная камера сможет определять направление полосы движения, а при отклонении от заданной траектории будет самостоятельно корректировать положение автомобиля на ней. Это позволит избавиться от постоянных подруливаний, утомляющих водителя при длительных поездках.
Основной электронный блок управления (ЭБУ) отслеживает вращение рулевого колеса с помощью множества датчиков, после этого получает информацию о скорости, вертикальных и боковых ускорениях и отправляет сигнал на актуаторы. Актуатор – это электромотор, поворачивающий колесо.
Симулятор управления помогает понять водителю, что происходит с колесами. Устройство осуществляет обратную связь «колесо-руль» и передает информацию, похожую на получаемую водителем при использовании гидроусилителя.
Мотор, редуктор, ограничительный механизм поворота, сенсор поворота и гаситель крутильных колебаний установлены на один вал для экономии места и снижения веса.
Чтобы создать водителю комфортное чувство при управлении, эффективность демпфирования гасителя крутильных колебаний увеличена, за счет заполнения пространство между ведомым валом и кожухом жидкостью с высокой вязкостью.
Рулевое управление осуществляется за счет электромоторов 3, управляемых блоком управления 2, принимающего сигнал от водителя 1. Электромоторы поворачивают рычаги 4, по или против часовой стрелки, вокруг их оси, перемещая рулевые тяги 5, воздействуя при этом на рычаги 9 и поворачивая колеса.
Соединительный аппарат 6 предназначен для аварийной ситуации, когда один из электромоторов вышел из строя. Соединительная муфта 7, находящаяся в аппарате служит для соединения или рассоединения штоков 8.
1.1.2. Аварийное управление
Муфта служит для установления механической связи «руль-колесо» в аварийной ситуации, когда ЭДСУ выходит из строя. Вал, подключенный непосредственно к рулевому колесу, соединяется с валом, подключенным к рулевому механизму, таким образом, управление становится возможным.
Задачей настоящего изобретения – сделать электродистанционную систему управления более компактной в целом, менее зависимой от сбоя в электрической системе, уменьшить потребление энергии, а также уменьшить крутящий момент при торможении.
Электродистанционная система управления замещает систему, в которой рулевое колесо и рулевой механизм автомобиля механически соединены, а колеса поворачиваются с помощью электрических сигналов. Так как электродистанционная система управления обходится без рулевого вала, увеличивается пространство и обеспечивается автоматическое регулирование угла поворота, согласно скорости транспортного средства. Таким образом, электродистанционная система управления создана в целях повышения безопасности и маневренности движения транспортных средств.
Муфта – отказоустойчивый механизм электродистанционной системы управления. Когда система выходит из строя, Муфта приводится в зацепленное состояние и делает возможным управлять автомобилем непосредственно с помощью рулевого колеса, а не с помощью системы.
Электродистанционная система управления содержит первый вал, соединенный с рулевым колесом, первый электродвигатель, который приводит в движение первый вал, второй вал, соединенный с рулевым механизмом, и второй двигатель для приведения в движение второго вала. Сцепление установлено между первым и вторым валами для их соединения или разъединения. В обычном режиме, муфта удерживается в выключенном состоянии, и рулевое управление осуществляется за счет первого двигателя, приводящего в движение первый вал, и второго двигателя, связанного со вторым валом.
Муфта имеет внутреннее кольцо 1 и наружное кольцо 2, у которых одна ось вращения, поверхность наружного кольца представляет собой цилиндрическую поверхность 5, а наружная поверхность внутреннего кольца выполнена в виде многогранника 6. Между поверхностями 6 и 5 находится сепаратор 3, имеющий столько же количество секций 7, сколько граней у поверхности 6, с роликами 4, находящимися в каждой секции 7. Сепаратор 3 обычно находится в нейтральном положении Рис. 9, где ролики 4 одновременно не связывают поверхность 6 внутреннего кольца 1 и цилиндрическую поверхность 5 наружного кольца 2.
Внутреннее кольцо 1 передает крутящий момент валу 22 через зубчатое или шлицевое соединение. Внешнее кольцо 2 так же передает крутящий момент валу 23, а эти валы в свою очередь подключены к первому или второму валу системы ЭДСУ. Таким образом, валы соединены или рассоединены в зависимости от состояния муфты.
В муфте находится соленоид 9 для регулирования механической части сцепления. Когда соленоид находится под напряжением, механическая часть муфты находится в выключенном состоянии, а, когда соленоид находится в обесточенном состоянии, механический участок муфты находится в состоянии зацепления.
Вид А
Вид Б
Ротор 16 прикреплен к валу 22. Ротор 16 поддерживается с помощью роликового подшипника, следовательно возможно вращение вала 22 и ротора 16 независимо друг от друга. Ротор 16 соединен с наружным кольцом 12 через направляющую ротора 21, сделанную из немагнитного материала. Один конец ротора 16 выполнен в виде изогнутого по радиусу наружного выступа, который вставлен в паз в наружном кольце 2 для фиксации. Между ротором 16 и наружным кольцом 2 находится якорь 15 .
1.1. Электропривод рулевого управления с отказоустойчивым механизмом-дублирующим электромотором
Электронная цифровая система состоит из:
· Электронных модулей
· Симулятор управления
· Рулевого механизма
Принцип работы аналогичен принципу работы электроприводу рулевого управления с отказоустойчивым механизмом-мофтой.
1.2.1. Аварийное управление
Система аварийного управления подразумевает под собой второй электродвигатель 2, помещенный в рулевой механизм. В случае выхода из строя основного двигателя 1, переключение на вторичный происходит мгновенно (0,1 секунды) с помощью механизма переключения 3.
1.3. Электрогидравлический привод Servotwin
Serwotwin – это двухконтурная электрогидравлическая рулевая система с отдельным источником питания для четырехосных ТС, работающих в тяжелых условиях строительства, либо для грузовиков, предназначенных для магистральных перевозок. В нее входят:
· Поршень
· Червячный вал
· Шариковая цепь
· Вал
· Червячная передача
· Электромотор
· Блок управления
Рис. 14. Компоновка автомобиляServotwin в основном состоит из двух компонентов: широко-используемого рулевого механизма с гидроусилителем Servocom и электрического двигателя с блоком управления и червячным редуктором. Через шестерни передается дополнительный крутящий момент, создаваемый элекромотором, то есть создается усиление рулевого привода в зависимости от скорости, активный возврат рулевого колеса в положение прямолинейного движения, что избавляет водителя от необходимости дополнительного подруливания и возможность отличного маневрирования на месте. Если электронная система выходит из строя, то ее заменяет гидравлическая.
1.3.1. Аварийное вождение
В случае отказа электромотора, циркуляция жидкости, перемещающая поршень, обеспечивает помощь при вращении рулевого колеса. Особенностью этой систем является энергосберегающий насос VARIOSERV. Благодаря своей оптимизированной конструкции этот регулируемый насос осуществляет перекачку лишь реально необходимого объема гидравлической жидкости, что позволяет снизить энергопотребление до 50 % (расход топлива 0,6 л / 100 км).
2. Структурная схема системы электропривода рулевого управления
3. Вывод
В данной научно-исследовательской работе был проведен анализ трех систем с электроприводом рулевого управления. В результате, я считаю, что наиболее безопасной является система с гидроэлектроприводом Serwotwin. Сейчас идут разработки для внедрения этой технологии в общественный транспорт, в частности в автобусы. На данный момент она используется на тяжелых грузовиках марки Mercedes.
Так же была создана структурная схема для дальнейшего исследования. В будущем будут проводиться расчеты рулевого управления, в частности описываться зависимость угла поворота колес от угла поворота рулевого колеса.