Заметил эту идею на иностранном форуме владельцев 3d-принтеров, и решил сам попробовать реализовать ее. Закупил всё что нужно для создания в домашних условиях станка по разрисовыванию яиц, а также любых других сферических предметов (шариков, мячиков и тд) далее я буду называть его яйцебот.
Это мой первый обзор, и вообще я тексты такой длины никогда не писал, поэтому оставьте свое мнение в виде пальца вверх, если понравилось, или пальца вниз, хотя и нежелательно)
Итак, начнём с теории. Что такое яйцебот (eggbot)?
Для тех, кто не в курсе яйцебот — это машина (ЧПУ-станок), которая обычным фломастером (карандашом\ручкой\кистью) умеет рисовать на любых сферических объектах: яйцах, теннисных шариках, ёлочных игрушках. Концепт механизма придумал дизайнер Bruce Shapiro в далеком 1990-м году, а не так давно знаменитая компания Evil Mad Scientist Laboratories выпустила в свободную продажу свою версию под названием The EggBot. Надо отдать должное Evil Mad Scientist Laboratories свой проект сделала открытым и разрешает пользоваться программным обеспечением для других яйцеботов даже в коммерческих проектах.
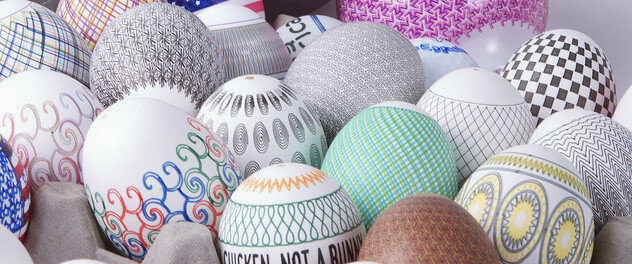
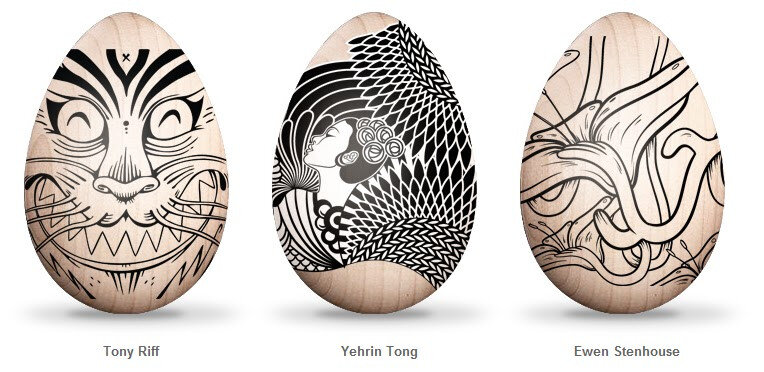
C помощью яйцебота можно делать вот такие рисунки:
Для сборки яйцебота нам понадобятся следующие запчасти:
1 x Arduino UNO (лучше взять 2шт. так как в процессе сборки один можно спалить неправильным подключением)
2 x Шаговый двигатель 28BYJ-48-5V (можно также использовать 28BYJ-48-12V, но к ним надо брать блок питания на 12V)
2 x ULN2003 Драйвер шагового двигателя
1 x SG90 Микро серво двигатель
1 x 12V Блок питания (при условии, что вы планируете собирать яйцебот на шаговых двигателях 28BYJ-48-12V)
1 x USB Кабель для соединения с компом
2 x 608 Подшипник (легко вытаскивается из уже заброшенных детьми спиннеров)
Немного проводов для подключения между собой arduino UNO и драйверов. (12 проводов с разъёмами папа-мама, длинной около 15см и 3 провода папа-папа длинной также около 15см)
Также нам понадобятся следующие комплектующие:
1 x 15x20мм Пружина 9можно сделать из PLA, можно вытащить из старой игрушки.)
1 x 2x18мм Гвоздь без шляпки
2 x M4x16 Болт
2 x M4 Гайка
8 x M3x12 Винт
5 x M3x16 Винт
12 x M3 Гайка
4 x M3 Шайба
12 x M2x4 Винт
24мм резиновая прокладка (можно и напечатать, если есть Flex пластик)
15мм резиновая прокладка (можно и напечатать, если есть Flex пластик)
Их можно найти на рынке, выгрести из старых запасов и т.д. Заказывать болты винты и гайки в онлайн магазине
смысла нету.
Все запчасти я решил заказывать на TAOBAO.
Вместе с доставкой весь набор обошелся мне в 38.82$
Но как видим, комплектующих я брал с запасом. +1 шаговый двигатель, +1 серводвигатель и +1 подшипник. (кстати моей ошибкой было то, что я не взял +1 Arduino UNO, что в последствии доставило мне много лишних хлопот)
Весь комплект добирался до меня почти 30 дней.
На почте получил хорошо упакованную коробку:
И внутри вся электроника для будущего станка:
Подробнее:
Arduino UNO:
Шаговые моторы 28BYJ-48-5V с драйвером ULN2003:
Микро серво двигатель SG90:
Подшипники 608ZZ:
Кстати, интересное наблюдение, эти же подшипники можно вытащить из спиннера:
Они абсолютно идентичные:
Блок питания на 12V. 2А. В моем проекте он не используется. Потому что я использую шаговые двигатели на 5V. Блок питания был взят для другого проекта:
В комплекте к блоку питания в подарок лежала открывашка:
(я правда пиво не пью, поэтому задарил её брату в этот же день)
Также для проекта я напечатал детали на своём 3Д принтере следующий список деталей:
1 x 0000001. Нижняя крышка корпуса
1 x 0000002. Верхняя крышка корпуса
1 x 0000003. Логотип
2 x 0000004. Держатель гайки М4
1 x 0000005. Правая ось поддержки яйца
1 x 0000006. Держатель пружины
1 x 0000007. Держатель правой оси
1 x 0000008. Фиксатор оси поддержки
2 x 0000009. Держатель болта М4 низ
2 x 0000010. Держатель болта М4 верх
1 x 0000011. Держатель левой оси
1 x 0000012. Левая ось поддержки яйца
1 x 0000013. Держатель руки маркера
1 x 0000014. Направляющая держателя руки маркера
1 x 0000015. Корпус направляющей
1 x 0000016. Рука маркера H
1 x 0000017. Рука маркера V
1 x 0000018. Правая крышка корпуса
Синий пластик это PLA от BestFilament
Зеленый пластик это PLA от Creozone.
В итоге всё что нужно для сборки яйцебота можно увидеть на фото:
Электронику подключал по следующей схеме:
Для работы яйцебота нам нужно скачать и залить в arduino прошивку.
И скачать и установить на компьютер программу inkscape с уже встроенным плагином eggbot. Для использования её в качестве управляющей программы.
Я всё это сделал.
НО! В процессе выяснилось, что пришедшая Arduino UNO пришла ко мне без залитого бутлодера.
Поэтому залить в неё прошивку не получалось:
В Arduino IDE она определяться отказывалась:
И даже попытка прошить плату, используя в качестве ISP-программатора другую Arduino UNO ни к чему не привела:
Очень жалко, но так как руки чешутся, собрать яйцебот хочется, пришлось вместо Arduino UNO использовать имеющийся у меня arduino MEGA. В корпус она уже не влезет, но по крайней мере будет работать, пока другая Arduino UNO будет ехать ко мне с Китая.
Но просто так прошивка для UNO заливаться в MEGA не будет. Для желающих повторить, нужно сделать поправку в коде:
Нужно заменить строчку SPMCSR &= ~SELFPRGEN; на SPMCSR &= ~SPMEN;
После этого уже прошивка нормально загружается в arduino MEGA и яйцебот готов к работе. Правда имеет вид не очень эстетичный:
Но тут уже ничего не поделать. Лучше так, чем ждать еще месяц пока придёт UNO.
Еще несколько фотографий для представления как это выглядит в сборе:
С зажатым яйцом. До первых опытов. Яйцо чистое. В качестве пера используется обычный маркер с тонким кончиком:
Маркер с толстым кончиком:
Также вместо маркера можно использовать обычный карандаш:
Но карандаш плохо видно на некоторых яйцах.
Хорошо себя зарекомендовала Ручка роллер Erich Krause.
Вот пример:
А вот примеры с маркером:
Возможно данный обзор написан недостаточно подробно, но что узнал и освоил в процессе покупки, сборки и наладки вроде рассказал. Проект eggbot считаю выполненным.
Мне очень понравился как процесс, так и результат. Местами пришлось хорошо напрячься, чтобы заставить работать эту шайтан-машину. Местами даже пришлось крепко понадоедать с вопросами автору проекта (надеюсь Владимир на меня за это не в обиде)
Но результат того стоит. Эта машинка скоро начнёт использоваться для изготовления оригинального подарка родственникам. Рисовать поздравления с новым годом на ёлочных шариках (не показал на фото, потому что за шариками поедем с семьёй только через неделю).
Я лично прокачал свои навыки в качестве электронщика. И понял, что не такой уж я и тугодум, и вполне еще способен обучаться.
Если вы надумаете собирать такой же яйцебот, вы можете использовать данный обзор как гайд.
На этом всё. Спасибо за внимание.
Надеюсь обзор вам понравился, по крайней мере я очень старался чтобы так было!
Лучшей благодарностью будет палец вверх и подписка на блог.